Setelah menonton video di Youtube dan anak-anak saya meneteskan air liur, saya memutuskan untuk mencoba merakit sendiri perangkat ini di skuter gyro sewaan. Berdebat tentang kemanfaatan membuat sendiri atau membelinya, saya meyakinkan diri sendiri bahwa itu adalah mainan, dan musiman, dan untuk anak-anak saya cuaca tidak akan cocok dengan satu perangkat. Selain itu, pengalaman merakit mesin CNC rumahan juga berperan dalam kepercayaan diri, dan popularitas tren hoverboard itu sendiri serta efek wow pada orang-orang di sekitar saya turut berperan.
Pengalaman merakit gyro scooter Anda sendiri
Memulai, saya memutuskan untuk menguji konsep terlebih dahulu dan menentukan daya yang dibutuhkan unit elektromekanis untuk membenarkan investasi lebih lanjut dalam komponen.
Versi pertama (segway)
Dari segi mekanis, versi segwaynya tampak lebih sederhana (tidak ada unit putar tengah yang dimuat), selain itu, semua yang saya temukan di youtube adalah segway buatan sendiri.
Terlepas dari kenyataan bahwa saya memiliki pengalaman yang cukup dalam pemrograman dan bekerja dengan pengontrol, saya memutuskan untuk tidak menulis perangkat lunak itu sendiri, tetapi untuk menemukan solusi yang paling siap pakai. Selain itu, saya jarang dapat mempertahankan motivasi saya selama lebih dari satu bulan, dan perangkat lunak debugging dengan node elektromekanis jarang berakhir dengan kemenangan mutlak, lebih sering dengan kompromi, dan pemikiran bahwa kesempurnaan belum tercapai akan mengganggu saya.
Akibatnya, pilihan jatuh pada karya Klon Segway Ovaltine (sumbernya ada di GitHub). Proyek ini menurut saya merupakan perangkat keras paling matang dan mendukung yang saya miliki (Arduino, MPU-6050, driver motor dengan 2 dan 3 sinyal kontrol per saluran). Proyek ini dikomentari secara komprehensif, yang memungkinkan untuk tidak masuk jauh ke dalam analisis nuansa dan, sebagai hasilnya, tidak menebak-nebak tentang kekurangannya.
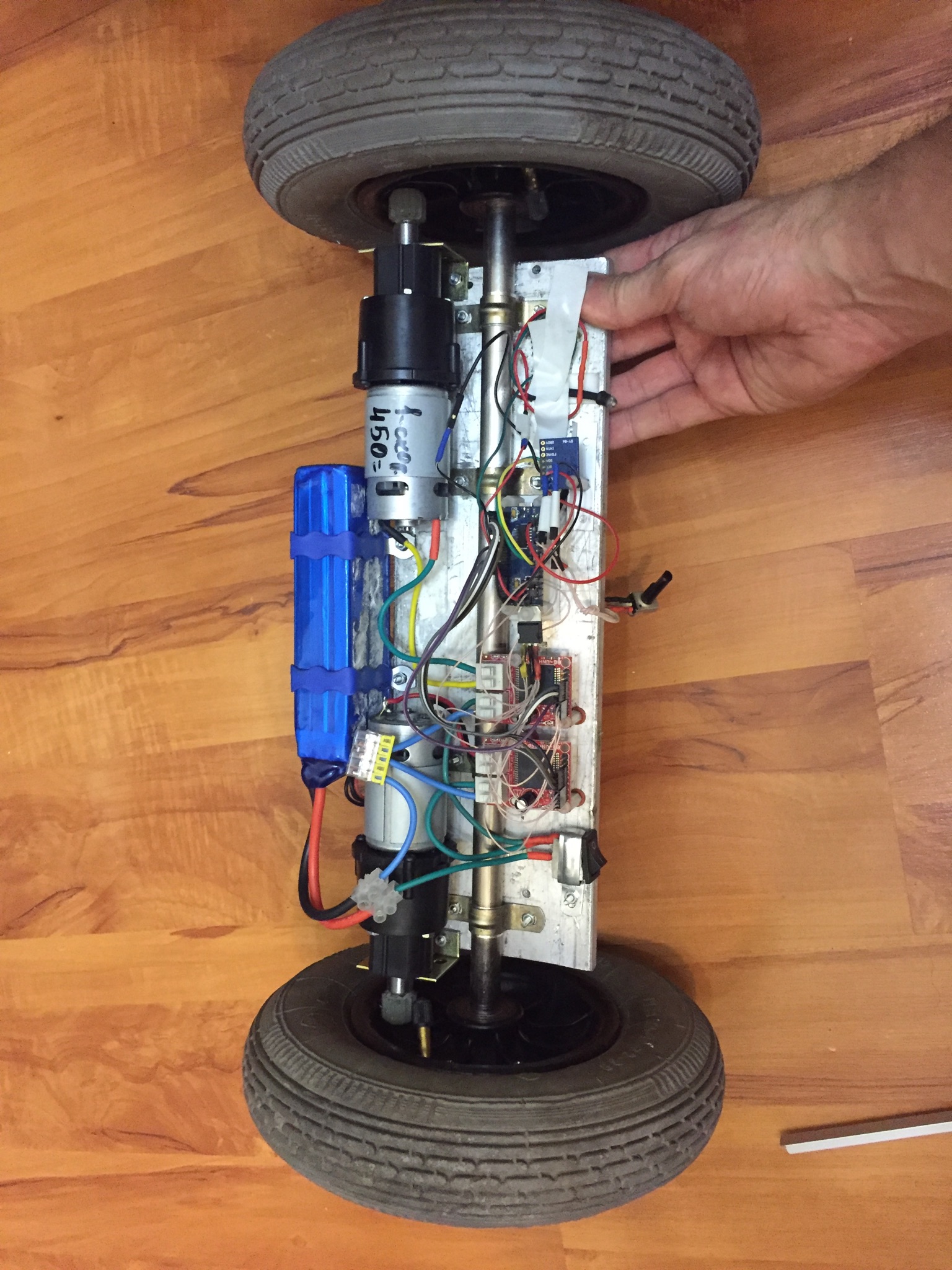
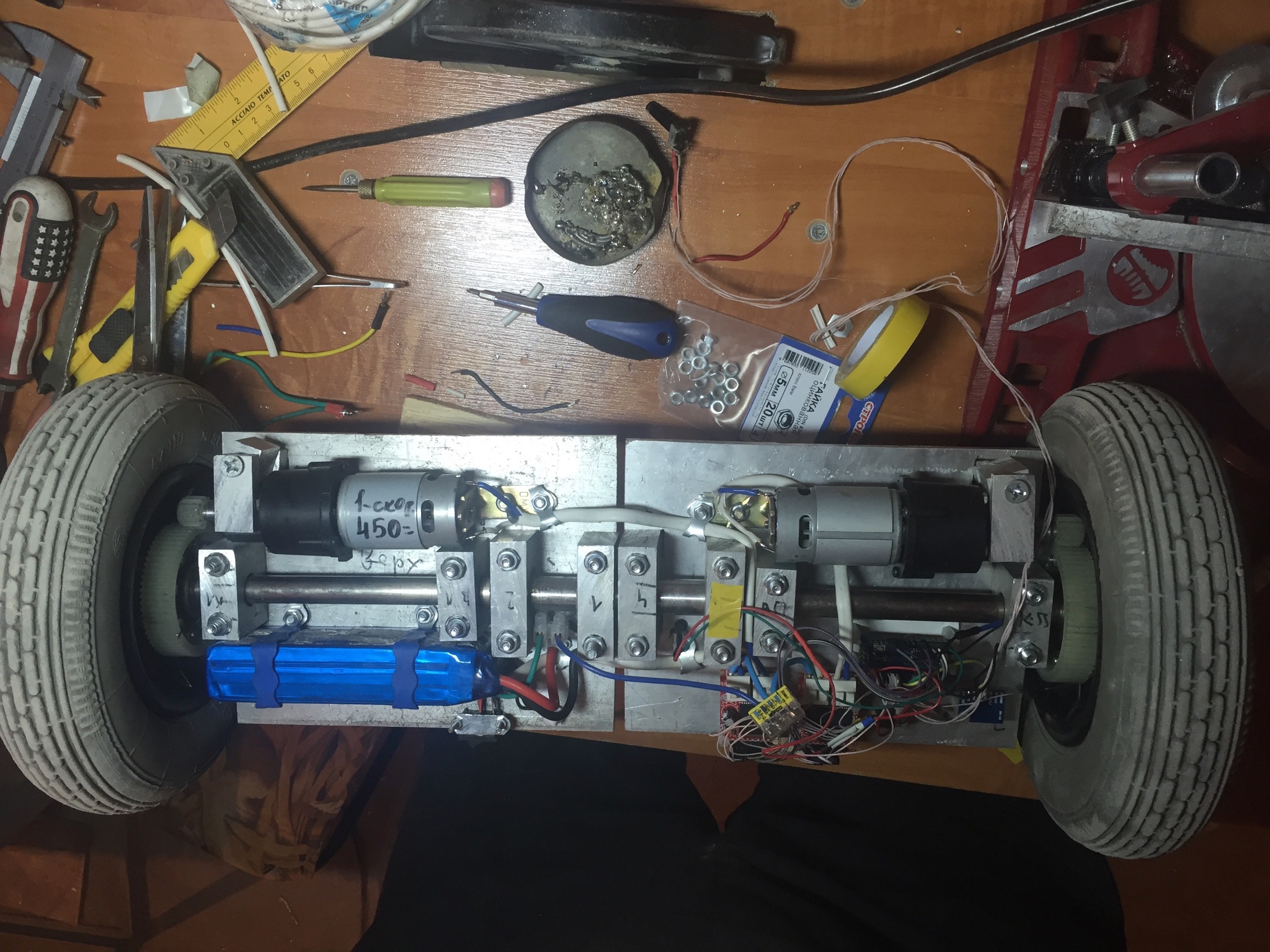
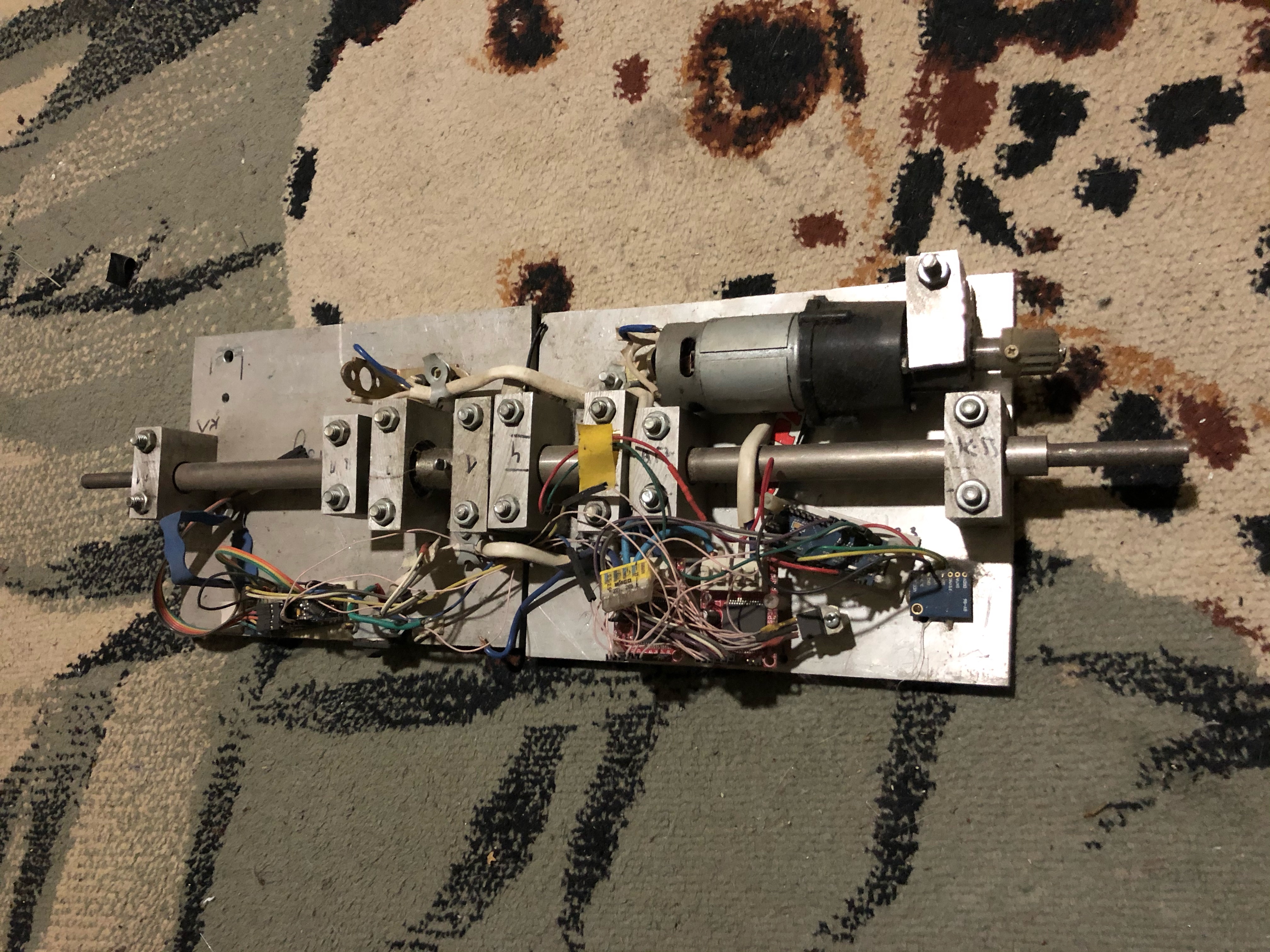
Setelah penundaan singkat, platform uji ditampar:
Ketebalan plat aluminium 12mm
Axle dengan diameter 14mm - panduan dari printer dot matrix
Konstruksi staples diameter 14mm
Roda - depan kursi roda (diameter 8 '', bantalan tertanam).
Motor dan kotak roda gigi planetary dari obeng 18V
Roda gigi transmisi di atas roda dari penggiling daging listrik
Baterai 12V 5Ah Li-pol (kiri setelah penurunan tren konstruksi quadcopter)
Driver Vhn3sp30
Arduino Nano
10DOF MPU-6050 ( )
,
, .1,3,4,5,6,11 .
, , , (450 , 500 ). ? , .
( 30). vnh2SP30 eBay 600, , vnh3SP30 « » (, ) .
. , , , .
: 0,5 . ( ). – . , , . 20 .
, « – » . 5:1. 1:25. 12 8 ( 5-8/). .
! vnh2 14.
.
, . , , , , , , .
()
, , , « ». , . 6 ( 12) ( 80).
, (). , .
( 17 23). , . . ( , , ). , .. (.. ).
, ( ). , , , .
: , . 16 , ( ) . . (6 .) , , .
22,5. , .
. . « ». . - . .

, , . , . ,
( \; __)
+5 : =5 =5. -5 (.. ) =5-(-5)=10; =5+(-5)=0. - .
( __; )
0 () : =0 =0. +5 ( ) =0+(-5)=-5; =5-(-5)=5. – .
( )
, ( ).
, Arduino . analogRead ( ), .. .
.
, , . «» ( ) . .
, , ( 3 ), . .. , . , .

, .
(204) . , . , , 5 . .
, , .
, . , . ( 1,5-3 - ) . , ( ). - 135…125.
– . , , «» .
5 . .
...
... dan pengalaman tak ternilai untuk melepaskan motivasi dari sofa!
Itu saja. Semuanya bagus!