Saat melakukan penelitian ilmiah dan terapan, model sering dibuat di mana titik dan / atau vektor ruang tertentu dipertimbangkan. Sebagai contoh, model sandi kurva eliptik menggunakan ruang affine dan proyektif. Yang proyektif digunakan ketika diperlukan untuk mempercepat penghitungan, karena dalam rumus untuk memanipulasi titik-titik kurva elips yang diturunkan dalam kerangka ruang proyektif, tidak ada operasi pembagian dengan koordinat, yang tidak dapat dilewati dalam kasus ruang affine .
Operasi divisi hanyalah salah satu operasi yang paling "mahal". Faktanya adalah bahwa dalam bidang aljabar, dan karenanya dalam kelompok, tidak ada operasi pembagian sama sekali dan jalan keluarnya (jika tidak mungkin untuk tidak membagi) adalah bahwa operasi pembagian diganti dengan perkalian, tetapi dikalikan bukan dengan koordinat itu sendiri, tetapi dengan nilai kebalikannya ... Dari sini dapat disimpulkan bahwa pertama-tama seseorang harus melibatkan algoritme Euclidean GCD yang diperluas dan sesuatu yang lain. Singkatnya, tidak semuanya sesederhana yang digambarkan oleh penulis sebagian besar publikasi tentang ECC. Hampir semua yang telah dipublikasikan tentang topik ini dan tidak hanya di Internet tidak asing bagi saya. Tidak hanya penulisnya tidak kompeten dan terlibat dalam kata-kata kotor, penilai publikasi ini menambahkan penulis di komentar, yaitu, mereka tidak melihat celah atau kesalahan yang jelas. Tentang artikel biasa, mereka menulis bahwa itu sudah 100500 dan tidak memiliki efek nol.Sejauh ini semuanya diatur di Habré, analisis publikasi sangat besar, tetapi bukan kualitas konten. Tidak ada yang keberatan di sini - iklan adalah mesin bisnis.
Ruang vektor linier
Studi dan deskripsi fenomena dunia sekitar selalu membawa kita pada pengenalan dan penggunaan sejumlah konsep seperti titik, angka, spasi, garis lurus, bidang, sistem koordinat, vektor, himpunan, dll.
Misalkan r <3>= <r1, r2, r3> vektor ruang tiga dimensi, menentukan posisi satu partikel (titik) relatif terhadap asalnya. Jika kita mempertimbangkan elemen N, maka deskripsi posisinya membutuhkan penentuan koordinat 3 ∙ N, yang dapat dianggap sebagai koordinat beberapa vektor dalam ruang berdimensi 3N. Jika kita mempertimbangkan fungsi kontinu dan koleksinya, maka kita sampai pada ruang yang dimensinya sama dengan tak terhingga. Dalam praktiknya, mereka sering kali dibatasi untuk hanya menggunakan subruang dari ruang fungsi koordinat berdimensi tak hingga yang memiliki jumlah dimensi terbatas.
Contoh 1 . Deret Fourier adalah contoh penggunaan function space. Pertimbangkan perluasan fungsi arbitrer dalam deret Fourier
Ini dapat diartikan sebagai perluasan dari "vektor" f (x) menjadi himpunan tak terhingga dari vektor basis "ortogonal" sinnx.
Ini adalah contoh abstraksi dan perluasan konsep vektor ke sejumlah dimensi tak terhingga. Memang, diketahui bahwa untuk -π≤x≤π

Inti dari pertimbangan lebih lanjut tidak akan terganggu jika kita mengabstraksi dari dimensi ruang vektor abstrak - baik itu 3, 3N atau tak terhingga, meskipun untuk aplikasi praktis, bidang berdimensi hingga dan ruang vektor lebih diminati.
Himpunan vektor r1, r2,… akan disebut ruang vektor linier L jika jumlah dari dua elemennya juga ada dalam himpunan ini dan jika hasil perkalian sebuah elemen dengan bilangan C juga termasuk dalam himpunan ini. Mari kita segera membuat reservasi bahwa nilai-nilai bilangan C dapat dipilih dari himpunan bilangan yang terdefinisi dengan baik F - bidang residu modulo bilangan prima p, yang dianggap melekat pada L.
Contoh 2 . Sekumpulan 8 vektor yang terdiri dari n = 5-bit bilangan biner
r0 = 00000, r1 = 10101, r2 = 01111, r3 = 11010, r4 = 00101, r5 = 10110, r6 = 01001, r7 = 11100 membentuk ruang vektor L jika bilangan C є {0,1}. Contoh kecil ini memungkinkan Anda memverifikasi manifestasi properti ruang vektor yang termasuk dalam definisinya.
Penjumlahan vektor-vektor ini dilakukan dengan bitwise modulo dua, yaitu, tanpa mentransfer satu ke bit yang paling signifikan. Perhatikan bahwa jika semua C adalah nyata (dalam kasus umum C termasuk dalam bidang bilangan kompleks), maka ruang vektor disebut nyata.
Secara formal, aksioma ruang vektor dituliskan sebagai berikut:
r1 + r2 = r2 + r1 = r3; r1, r2, r3 є L - penambahan komutatifitas dan penutupan;
(r1 + r2) + r3 = r1 + (r2 + r3) = r1 + r2 + r3 - asosiatif penjumlahan;
ri + r0 = r0 + ri = ri; ∀i, ri, r0 є L - keberadaan elemen netral;
ri + (- ri) = r0, untuk ∀i ada vektor yang berlawanan (-ri) є L;
1 ∙ ri = ri ∙ 1 = ri adanya satuan perkalian;
α (β ∙ ri) = (α ∙ β) ∙ ri; α, β, 1, 0 adalah elemen dari bidang bilangan F, ri є L; perkalian dengan skalar bersifat asosiatif; hasil perkalian menjadi milik L;
(α + β) ri = α ∙ ri + β ∙ ri; untuk ∀i, ri є L, α, β adalah skalar;
a (ri + rj) = ari + arj untuk semua a, ri, rj є L;
a ∙ 0 = 0, 0 ∙ ri = 0; (-1) ∙ ri = - ri.
Dimensi dan dasar ruang vektor
Saat mempelajari ruang vektor, menarik untuk memperjelas pertanyaan seperti jumlah vektor yang membentuk seluruh ruang; apa dimensi ruang; apa himpunan vektor terkecil, dengan menerapkannya operasi penjumlahan dan perkalian dengan angka, memungkinkan untuk membentuk semua vektor ruang? Pertanyaan-pertanyaan ini fundamental dan tidak dapat diabaikan, karena tanpa jawaban mereka, kejelasan persepsi dari segala sesuatu yang membentuk teori ruang vektor akan hilang.
Ternyata dimensi ruang terkait erat dengan ketergantungan linier vektor, dan dengan jumlah vektor bebas linier yang dapat dipilih dalam ruang yang diteliti dengan berbagai cara.
Independensi linier dari vektor
Himpunan vektor r1, r2, r3 ... r dari L disebut bebas linier jika bagi mereka relasinya
dipenuhi hanya dalam kondisi persamaan simultan .
Semua , k = 1 (1) p, termasuk dalam bidang residu numerik modulo dua
F = {0, 1}.
Jika dalam beberapa ruang vektor L seseorang dapat memilih himpunan vektor p yang relasinya terpenuhi, asalkan tidak semuasecara bersamaan, yaitu di bidang pemotongan ternyata dimungkinkan untuk memilih satu set , k = 1 (1) , di antaranya ada yang bukan nol, maka vektor tersebut disebut dependen linier.
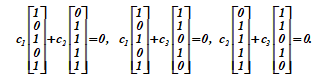
Contoh 3. Dua vektor di pesawat = <0, 1>Tdan = <1, 0>Tbebas linear, karena dalam relasi (transposisi-T)
tidak mungkin untuk mengambil pasangan nomor apa pun koefisien tidak sama dengan nol pada saat yang sama, sehingga rasio terpenuhi.
Tiga vektor = <0, 1>T, = <1, 0>T, = <1, 1>Tmembentuk sistem vektor dependen linier, karena dalam relasinya

kesetaraan dapat dipastikan dengan memilih koefisien tidak sama dengan nol pada saat bersamaan. Apalagi vektornya adalah sebuah fungsi dan (jumlah mereka), yang menunjukkan ketergantungan dari dan ... Bukti dari kasus umumnya adalah sebagai berikut.
Biarkan setidaknya salah satu nilai, k = 1 (1) p, misalnya, , dan relasinya terpenuhi. Artinya vektor, k = 1 (1) , adalah dependen linier
Mari kita secara eksplisit memisahkan vektor r

Vektor r p dikatakan kombinasi linier dari vektoratau r p melalui vektor yang tersisa diekspresikan secara linier, yaitu r p secara linier tergantung pada yang lain. Dia adalah fungsinya.
Pada bidang dua dimensi, setiap tiga vektor bergantung secara linier, tetapi dua vektor non-collinear tidak bergantung. Dalam ruang 3D, tiga vektor non-koplanar apa pun adalah bebas linier, tetapi empat vektor apa pun selalu bergantung secara linier.
Ketergantungan / kemandirian penduduk {} vektor sering ditentukan dengan menghitung determinan dari matriks Gram (barisnya adalah hasil kali dari vektor kita). Jika determinannya nol, ada vektor dependen di antara vektor; jika determinannya bukan nol, vektor dalam matriks tidak bergantung.
Penentu Gram (Gramian) dari sistem vektor
penentu matriks Gram dari sistem ini disebut dalam ruang Euclidean:
Dimana - perkalian titik dari vektor
dan ...
Dimensi dan dasar sebuah ruang vektor
Dimensi s = d (L) dari sebuah ruang L didefinisikan sebagai jumlah vektor terbesar di L yang membentuk himpunan bebas linier. Dimensi bukanlah jumlah vektor pada L, yang tidak terbatas, dan bukan jumlah komponen vektor.
Ruang berdimensi hingga s ≠ ∞ disebut berdimensi hingga jika
s = ∞, berdimensi tak hingga.
Jawaban atas pertanyaan tentang jumlah minimum dan komposisi vektor yang memastikan pembangkitan semua vektor dalam ruang vektor linier adalah pernyataan berikut.
Kumpulan s vektor bebas linier dalam ruang L membentuk basa dan snya. Ini mengikuti dari fakta bahwa vektor apapunruang vektor berdimensi s linier L dapat direpresentasikan dengan cara yang unik sebagai kombinasi linier dari vektor basis.
Kami memperbaiki dan dilambangkan dengan simbol, i = 1 (1) s, adalah salah satu tupel pembentuk dasar ruang L. Then
Angka r ki , i = 1 (1) s disebut sebagai koordinat vektor di dasar , i = 1 (1) s, dan r ki = (, ).
Mari kita tunjukkan keunikan representasi tersebut... Jelas, set, tergantung, sejak , i = 1 (1) s adalah basis. Dengan kata lain, ada seperti itu tidak secara bersamaan sama dengan nol, itu ...
Apalagi biarkarena jika , lalu setidaknya satu dari , itu akan menjadi bukan nol dan kemudian vektor , i = 1 (1) s, akan bergantung secara linier, yang tidak mungkin, karena ini adalah basis. Karena itu,


menggunakan metode pembuktian "dengan kontradiksi", kita menganggap bahwa representasi tertulisbukan satu-satunya di dasar ini dan ada sesuatu yang lain

Kemudian kami menuliskan perbedaan representasi, yang, tentu saja, dinyatakan sebagai

Jelas, sisi kanan dan kiri sama, tetapi yang kiri mewakili selisih vektor dengan dirinya sendiri, yaitu sama dengan nol. Akibatnya, ruas kanan juga nol. Vektor, i = 1 (1) s independen linier, sehingga semua koefisiennya hanya bisa nol. Dari sini kita mendapatkan itu

dan ini hanya mungkin untuk

Pilihan dasar. Orthonormalitas
Vektor disebut dinormalisasi jika panjang masing-masing sama dengan satu. Ini dapat dicapai dengan menerapkan prosedur normalisasi ke vektor arbitrer.
Vektor disebut ortogonal jika tegak lurus satu sama lain. Vektor tersebut dapat diperoleh dengan menerapkan prosedur ortogonalisasi untuk masing-masing vektor. Jika kedua properti dipenuhi untuk satu set vektor, maka vektor tersebut disebut orthonormal.
Kebutuhan untuk mempertimbangkan basis ortonormal disebabkan oleh kebutuhan untuk menggunakan transformasi cepat dari fungsi satu - dan fungsi multidimensi. Tugas pemrosesan tersebut muncul dalam studi kode pengkodean pesan informasi dalam jaringan komunikasi untuk berbagai tujuan, dalam studi gambar yang diperoleh
melalui perangkat otomatis dan otomatis, di sejumlah area lain menggunakan representasi informasi digital.
Definisi. Kumpulan n vektor bebas linier dari
ruang vektor berdimensi n V disebut basisnya.
Teorema . Setiap vektor x dari ruang vektor berdimensi n linier V dapat direpresentasikan, terlebih lagi, dengan cara yang unik, dalam bentuk kombinasi linier dari vektor basis. Ruang vektor V di atas bidang F memiliki properti berikut:
0 x = 0 (0 di sisi kiri persamaan adalah elemen netral dari kelompok aditif bidang F; 0 di sisi kanan persamaan adalah elemen ruang V, yang merupakan elemen unit netral dari kelompok aditif V, yang disebut vektor nol );
(- 1) · x = –x; –1є F; x є V; –X є V;
Jika α x = 0єV, maka untuk x ≠ 0 selalu α = 0.
Misalkan Vn (F) adalah himpunan semua urutan (x1, x2, ..., xn) dengan panjang n dengan komponen dari bidang F, yaitu, Vn (F) = {x, sehingga x = (x1, x2, ..., xn), xi є F;
i = 1 (1) n}. Penjumlahan
dan perkalian dengan skalar didefinisikan sebagai berikut:
x + y = (x1 + y1, x2 + y2,…, xn + yn);
α x = (α x1, α x2,…, α xn), dengan y = (y1, y2,…, yn),
maka Vn (F) adalah ruang vektor di atas bidang F.
Contoh 4 . Pada ruang vektor r = 00000, r1 = 10101, r2 = 11010, r3 = 10101 di atas bidang F2 = {0,1} tentukan dimensi dan basisnya.
Keputusan. Mari membentuk tabel penjumlahan vektor dari ruang vektor linier
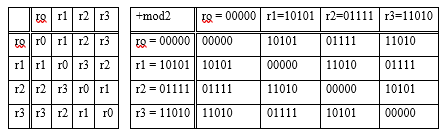
Dalam ruang vektor ini V = {ro, r1, r2, r3} setiap vektor memiliki kebalikannya. Dua vektor apa pun, tidak termasuk r, adalah bebas linier, yang mudah dibuktikan
c1 · r1 + c2 · r2 = 0; c1 r1 + c3 r3 = 0; c2 r2 + c3 r3 = 0;
Masing-masing dari tiga relasi hanya valid untuk nilai nol simultan dari pasangan koefisien ci, cj є {0,1}.
Ketika tiga vektor bukan nol dianggap bersamaan, salah satunya selalu merupakan jumlah dari dua lainnya atau sama dengan dirinya sendiri, dan r1 + r2 + r3 = r.
Jadi, dimensi ruang vektor linier yang dianggap sama dengan dua s = 2, d (L) = s = 2, meskipun masing-masing vektor memiliki lima komponen. Basis ruang adalah koleksi (r1, r2). Anda dapat menggunakan pasangan (r1, r3) sebagai basis.
Secara teoritis dan praktis, pertanyaan tentang mendeskripsikan ruang vektor itu penting. Ternyata setiap kumpulan vektor basis dapat dilihat sebagai baris dari beberapa matriks G, yang disebut matriks pembangkit ruang vektor. Vektor apa pun dari ruang ini dapat direpresentasikan sebagai kombinasi linier dari baris matriks G ( seperti, misalnya, di sini ).
Jika dimensi ruang vektor sama dengan k dan sama dengan jumlah baris matriks G, peringkat matriks G, maka jelas ada koefisien k dengan nilai q berbeda untuk menghasilkan semua kemungkinan kombinasi linier baris matriks. Selain itu, ruang vektor L mengandung q k vektor.
Himpunan semua vektor dari ℤpn dengan operasi penjumlahan vektor dan perkalian vektor dengan skalar dari ℤp adalah ruang vektor linier.
Definisi . Himpunan bagian W dari ruang vektor V memenuhi ketentuan:
Jika w1, w2 є W, maka w1 + w2 є W,
Untuk α є F dan w element W, elemen αw є W itu
sendiri adalah ruang vektor di atas bidang F dan disebut subruang dari ruang vektor V.
Misalkan V adalah ruang vektor di atas bidang F dan himpunan W ⊆ V. Himpunan W adalah subruang dari ruang V jika W sehubungan dengan operasi linier yang ditentukan dalam V adalah ruang vektor linier.
Meja. Karakteristik ruang vektor
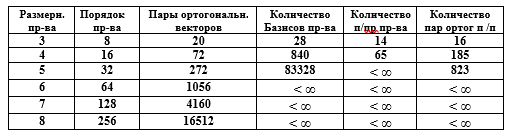
Kekompakan representasi matriks dari ruang vektor terlihat jelas. Misalnya, menentukan vektor L dari bilangan biner 50-bit, di antaranya 30 vektor membentuk dasar ruang vektor, memerlukan pembentukan matriks G [30,50], dan jumlah vektor yang dijelaskan melebihi 10 9 , yang tampaknya tidak masuk akal dalam notasi elemen-bijaksana.
Semua basis dari setiap ruang L dibagi oleh subkelompok P dari matriks non-degenerasi dengan det G> 0 menjadi dua kelas. Salah satunya (sewenang-wenang) disebut kelas dengan basis berorientasi positif (kanan), kelas lainnya berisi basis kiri.
Dalam hal ini, mereka mengatakan bahwa orientasi diberikan dalam ruang. Setelah itu, setiap basis adalah himpunan vektor yang teratur.
Jika penomoran dua vektor diubah pada basis kanan, maka basis akan menjadi kiri. Hal ini disebabkan oleh fakta bahwa dua baris ditukar pada matriks G, oleh karena itu determinan detG akan berubah tanda.
Norma dan perkalian titik dari vektor
Setelah menyelesaikan pertanyaan tentang menemukan basis ruang vektor linier, tentang generasi semua elemen ruang ini dan tentang representasi elemen apa pun dan ruang vektor itu sendiri melalui vektor basis, kita dapat mengajukan masalah pengukuran jarak antar elemen, sudut antar vektor, nilai komponen vektor di ruang ini. , panjang vektor itu sendiri.
Ruang vektor nyata atau kompleks L disebut ruang vektor bernorma jika setiap vektor r di dalamnya dapat dikaitkan dengan bilangan real || r || - modulus vektor, norma. Vektor satuan adalah vektor yang normanya sama dengan satu. Vektor nol memiliki komponen nol.
Definisi... Sebuah ruang vektor disebut kesatuan jika operasi biner didefinisikan di dalamnya yang menetapkan skalar untuk setiap pasangan ri, rj vektor dari L. Dalam tanda kurung (ri, rj) skalar atau hasil kali dalam dari ri dan rj ditulis (dilambangkan), dan
1. (ri, rj) = ri ∙ rj;
2. (ri, rj) = (ri ∙ rj) *, di mana * menunjukkan konjugasi kompleks atau simetri Hermitian;
3. (ri, rj) = (ri ∙ rj) - hukum asosiatif;
4. (ri + rj, rk) = (ri ∙ rk) + (rj ∙ rk) - hukum distributif;
5. (ri, rk) ≥ 0 dan dari (ri, rj) = 0 mengikuti ri = 0.
Definisi . Nilai positif dari akar kuadrat
 disebut norma (atau panjang, modulus) dari vektor ri. Jika = 1, maka vektor ri disebut ternormalisasi...
disebut norma (atau panjang, modulus) dari vektor ri. Jika = 1, maka vektor ri disebut ternormalisasi...
Dua vektor ri, rj dari ruang vektor kesatuan L saling ortogonal jika hasil kali skalarnya sama dengan nol, yaitu (ri, rj) = 0.
Untuk s = 3 dalam ruang vektor linier, akan lebih mudah untuk memilih tiga vektor yang saling tegak lurus sebagai basis. Pilihan ini sangat menyederhanakan sejumlah dependensi dan kalkulasi. Prinsip ortogonalitas yang sama digunakan saat memilih basis dalam ruang dan dimensi lain s> 3. Menggunakan operasi perkalian vektor skalar memberikan kemungkinan pilihan tersebut.
Keuntungan yang lebih besar dicapai ketika memilih sebagai dasar ruang vektor dari vektor normal ortogonal - basis ortonormal... Kecuali dinyatakan lain, berikut ini kita akan selalu mengasumsikan bahwa basis ei, i = 1 (1) s dipilih dengan cara ini, yaitu
Dalam ruang vektor kesatuan, pilihan ini selalu dapat direalisasikan. Mari kita tunjukkan kelayakan dari pilihan seperti itu.
Definisi. Misalkan S = {v1, v2,…, vn} adalah himpunan bagian terbatas dari ruang vektor V di atas bidang F.
Kombinasi linear vektor dari S adalah ekspresi bentuk a1 ∙ v1 + a2 ∙ v2 +… + an ∙ vn, di mana masing-masing ai ∊ F.
Amplop untuk himpunan S (notasi {S}) adalah himpunan dari semua kombinasi linier vektor dari S. Amplop untuk S adalah subruang dari V.
Jika U adalah spasi di V, maka U direntang oleh S (S berkontraksi U) jika {S} = U.
Himpunan vektor S bergantung secara linier pada F, jika ada skalar a1, a2, ..., an di F, tidak semua nol dimana a1 ∙ v1 + a2 ∙ v2 +… + an ∙ vn = 0. Jika tidak ada skalar seperti itu, maka himpunan tersebut vektor S secara linier bebas di atas F.
Jika ruang vektor V direntang oleh sistem vektor S yang tidak bebas linier (atau sistem S mengontrak ruang V), maka sistem S disebut basis untuk V.
Pengurangan secara sewenang-wenang menjadi bentuk ortonormal
Misalkan spasi V memiliki basis non-ortonormal ē i , i = 1 (1) s. Kami menunjukkan norma setiap vektor basis dengan simbol

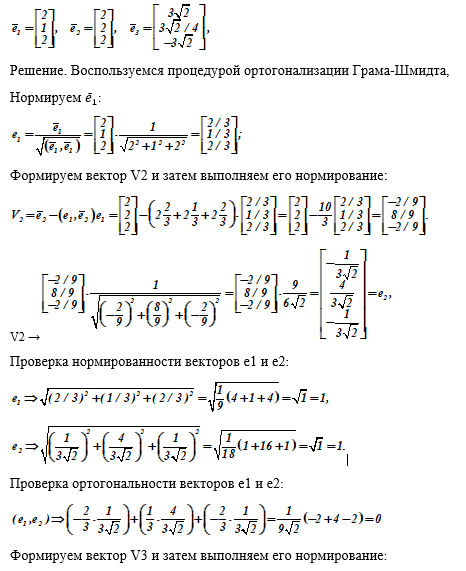
Prosedur untuk mereduksi basis menjadi bentuk ortonormalisasi didasarkan pada proses ortogonalisasi Gram-Schmidt, yang selanjutnya diimplementasikan dengan rumus berulang.

Dalam bentuk yang diperluas, basis ortogonalisasi dan algoritma normalisasi memuat kondisi sebagai berikut:
Bagilah vektor ē 1 dengan normanya; kita mendapatkan vektor dinormalisasi ē i = ē 1 / (|| ē 1 ||);
Kami membentuk V2 = ē 2 - (ē 1 , ē 2 ) e 1 dan menormalkannya, kami mendapatkan e 2 . Jelas bahwa then
(e1, e2) ~ (e1, e2) - (e1, e 2 ) (e1, e1) = 0;
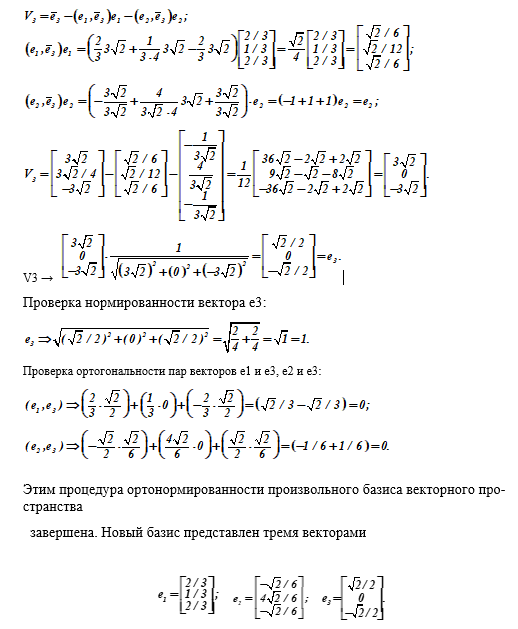
Membangun V3 = ē 3 - (e1, ē 3 ) e1 - (e2, ē 3 ) e2 dan menormalkannya, kita mendapatkan e3.
Untuk itu, kita segera memiliki (e1, e3) = (e2, e3) = 0.
Melanjutkan proses ini, kita mendapatkan himpunan ortonormal ē i , i = 1 (1) s. Himpunan ini berisi vektor bebas linier karena semuanya saling ortogonal.
Mari kita pastikan ini. Biarkan relasinya
Jika himpunan ē i , i = 1 (1) s bergantung, maka setidaknya satu koefisien cj tidak sama dengan nol cj ≠ 0.
Mengalikan kedua sisi rasio dengan ej, kita mendapatkan
(ej, c1 ∙ e1) + (ej, c2 ∙ e2) + ... + (ej, cj ∙ ej) +… + (ej, cs ∙ rs) = 0.
Setiap penjumlahan dalam penjumlahan tersebut sama dengan nol sebagai produk skalar dari vektor ortogonal, kecuali untuk (ej, cj ∙ ej), yang sama dengan nol di kondisi. Tetapi dalam istilah ini
(ej, ej) = 1 ≠ 0, oleh karena itu, hanya cj yang bisa menjadi nol.
Jadi, asumsi bahwa cj ≠ 0 tidak benar dan koleksinya bebas linear.
Contoh 5 . Dasar dari ruang vektor 3 dimensi diberikan:
{<-1, 2, 3, 0>, <0, 1, 2, 1>, <2, -1, -1,1>}.
Produk titik didefinisikan oleh relasi:
(<x1, x2, x3, x4>, <y1, y2, y3, y4>) = x1 ∙ y1 + x2 ∙ y2 + x3 ∙ y3 + x4 ∙ y4.
Dengan menggunakan prosedur ortogonalisasi Gram - Schmidt, kita mendapatkan sistem vektor:
a1 = <-1, 2, 3, 0>; a2 = <0, 1, 2, 1> -4 <-1, 2, 3.0> / 7 = <4, -1, 2, 7> / 7;
a3 = <2, -1, -1, 1> + ½ <-1, 2, 3, 0> - <4, -1, 2, 7> / 5 = <7, 2, 1, -4> / sepuluh.
(a1, a2) = (1 + 4 + 9 + 0) = 14;
a1 E = a1 / √14;
a2- (a1 E , a2) ∙ a1 E = a2- (8 / √14) (a1 / √14) = a2 - 4 ∙ a1 / 7;
Pembaca diundang untuk memproses vektor ketiga sendiri.
Vektor yang dinormalisasi mengambil bentuk:
a1 E = a1 / √14;
a2 E = <4, -1, 2, 7> / √70;
a3 E = <7, 2, 1, -4>/ √70;
Di bawah ini, dalam contoh 6, diberikan proses rinci rinci untuk menghitung penurunan basis ortonormal dari yang sederhana (diambil secara acak).
Contoh 6 . Kurangi basis tertentu dari ruang vektor linier menjadi bentuk ortonormal.
Diberikan: vektor basis
Subruang ruang vektor
Struktur ruang vektor
Representasi benda (benda) dalam ruang multidimensi adalah tugas yang sangat sulit. Jadi, kubus empat dimensi memiliki kubus tiga dimensi biasa sebagai mukanya, dan bukaan kubus empat dimensi dapat dibangun di ruang tiga dimensi. Sampai batas tertentu, "citra" dan kejelasan objek atau bagiannya berkontribusi pada studi yang lebih berhasil.
Hal tersebut di atas memungkinkan kita untuk mengasumsikan bahwa ruang vektor dapat dipotong-potong dengan cara tertentu, untuk memilih bagian-bagian di dalamnya, yang disebut subruang. Jelas, pertimbangan ruang dan objek multidimensi dan terutama berdimensi tak hingga dan objek di dalamnya menghilangkan kejelasan representasi, yang membuatnya sangat sulit untuk mempelajari objek di dalamnya.
spasi. Bahkan pertanyaan yang tampaknya sederhana seperti karakteristik kuantitatif elemen polihedra (jumlah simpul, tepi, wajah, dll.) Di ruang ini masih jauh dari terselesaikan sepenuhnya.
Cara konstruktif untuk mempelajari objek semacam itu adalah dengan memilih elemennya (misalnya, tepi, wajah) dan mendeskripsikannya dalam ruang dengan dimensi yang lebih rendah. Jadi kubus empat dimensi memiliki kubus tiga dimensi biasa sebagai mukanya, dan kubus empat dimensi dapat dibangun di ruang tiga dimensi. Sampai batas tertentu,
"citra" dan kejelasan objek atau bagiannya berkontribusi pada studi mereka yang lebih berhasil.
Jika L adalah perpanjangan dari bidang K, maka L dapat dianggap sebagai ruang vektor (atau linier) di atas bidang K. Unsur-unsur L (yaitu, vektor) membentuk kelompok abelian dengan penambahan. Selain itu, setiap "vektor" a є L dapat dikalikan dengan "skalar" r є K, dan produk ra kembali menjadi milik L (di sini ra hanyalah produk dalam arti operasi bidang L dari elemen r dan a dari bidang ini). Hukum juga terpenuhi
r ∙ (a + b) = r ∙ a + r ∙ b, (r + s) ∙ a = r ∙ a + r ∙ s, (r ∙ s) ∙ a = r ∙ (s ∙ a) dan 1 ∙ a = a, di mana r, s є K, a, b є L.
Hal tersebut di atas memungkinkan kita untuk mengasumsikan bahwa ruang vektor dapat dipotong-potong dengan cara tertentu, untuk memilih bagian-bagian di dalamnya, yang disebut subruang. Jelas, hasil utama dari pendekatan ini adalah untuk mengurangi dimensi subruang yang dialokasikan. Biarkan subruang L1 dan L2 dibedakan dalam ruang linier vektor L. Sebagai dasar untuk L1, himpunan yang lebih kecil ei, i = 1 (1) s1, s1 <s, dipilih daripada di L.
Vektor basis yang tersisa menghasilkan subruang L2 lain, yang disebut "komplemen ortogonal" dari subruang L1. Kami akan menggunakan notasi L = L1 + L2. Ini tidak berarti bahwa semua vektor ruang L adalah milik L1 atau L2, tetapi setiap vektor dari L dapat direpresentasikan sebagai jumlah vektor dari L1 dan vektor ortogonal dari L2.
Bukan himpunan vektor ruang vektor L yang dipisahkan, tetapi dimensi d (L) dan himpunan vektor basis. Jadi, subruang L1 dari ruang vektor L adalah himpunan L1 dari elemennya (berdimensi lebih rendah), yang dengan sendirinya merupakan ruang vektor sehubungan dengan operasi penjumlahan dan perkalian dengan bilangan yang dimasukkan dalam L.
Setiap vektor linier subruang Li - berisi vektor nol dan, bersama dengan salah satu vektornya, juga berisi semua kombinasi liniernya. Dimensi setiap subruang linier tidak melebihi dimensi dari ruang asli itu sendiri.
Contoh 7.Dalam ruang tiga dimensi biasa, semua subruang adalah garis lurus (dimensi s = 1) garis, bidang (dimensi s = 2) melewati titik awal. Dalam ruang n dari polinomial derajat paling banyak n, subruang adalah, misalnya, semua k untuk k <n, karena menambahkan dan mengalikan dengan bilangan polinomial derajat paling banyak k, kita akan kembali mendapatkan polinomial yang sama.
Namun, setiap ruang Pn terkandung sebagai subruang dalam ruang P dari semua polinomial dengan koefisien nyata, dan yang terakhir ini adalah subruang dari ruang C dari fungsi kontinu.
Matriks dengan tipe yang sama di atas bidang bilangan real juga membentuk ruang vektor linier, karena memenuhi semua aksioma ruang vektor. Ruang vektor L2 dari himpunan panjang n, yang masing-masing ortogonal dengan subruang L1 dari himpunan panjang n, membentuk subruang L2, yang disebut ruang nol untuk L1. Dengan kata lain, setiap vektor dari L2 bersifat ortogonal terhadap setiap vektor dari L1 dan sebaliknya.
Baik subruang L1 dan L2 adalah subruang dari ruang vektor L dari himpunan panjang n. Dalam teori pengkodean [4], masing-masing subruang L1 dan L2 menghasilkan kode linier ganda ke kode yang dihasilkan oleh subruang lain. Jika L1 adalah kode (n, k), maka L2 adalah kode (n, n - k). Jika kode adalah ruang vektor baris dari beberapa matriks, maka kode gandanya adalah ruang nol dari matriks ini dan sebaliknya.
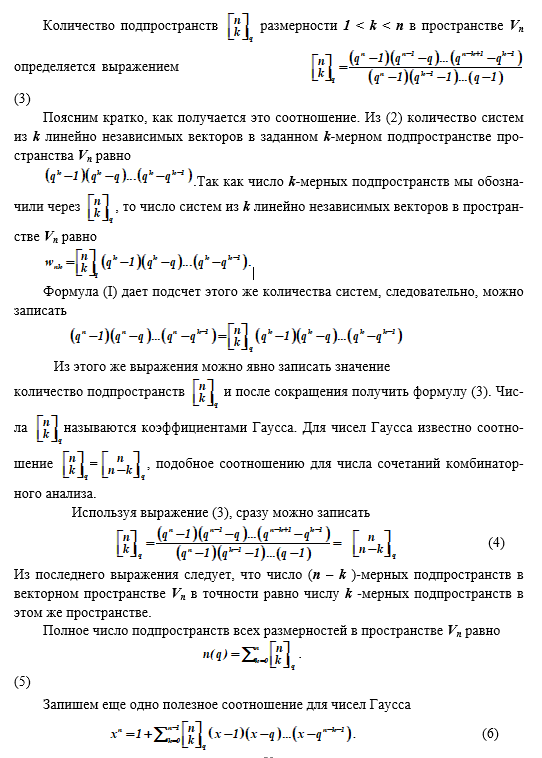
Pertanyaan penting dalam studi ruang vektor Vn adalah menetapkan strukturnya (struktur). Dengan kata lain, yang menarik adalah elemen, koleksinya (subruang dari dimensi 1 <k <n), serta hubungannya (pengurutan, penumpukan, dll.). Kita berasumsi bahwa ruang vektor Vn di atas bidang berhingga GF (q) yang dibentuk oleh elemen q = p r, di mana p adalah bilangan prima dan r adalah bilangan bulat.
Hasil berikut diketahui.
Jumlah subruang dari ruang vektor

Mari kita beri pembenaran berikut ini. Setiap vektor v1 ≠ 0 dari sistem k vektor independen linier (v1, v2,…, vk) dapat dipilih dalam q n - 1 cara. Vektor berikutnya v2 ≠ 0 tidak dapat diekspresikan secara linier dalam bentuk v1, yaitu. dapat dipilih dengan cara q n - q, dll.
Vektor terakhir vk ≠ 0 juga tidak diekspresikan secara linier dalam bentuk vektor yang dipilih sebelumnya v1, v2,…, vk dan, oleh karena itu, dapat dipilih dengan cara q n - q k - 1. Jumlah total cara untuk memilih himpunan vektor v1, v2, ..., vk, dengan demikian, didefinisikan sebagai hasil kali dari jumlah pilihan vektor individu, yang memberikan rumus (1). Untuk kasus ketika k = n, kita memiliki w = wn, n dan dari rumus (I) kita mendapatkan rumus (2).
Hasil generalisasi yang penting pada dimensi subruang.
Kumpulan semua tupel dengan panjang n ortogonal ke subruang V1 dari tupel dengan panjang n membentuk subruang V2 dari tupel dengan panjang n. Subruang V2 ini disebut ruang kosong untuk V1.
Jika sebuah vektor ortogonal untuk masing-masing vektor yang menghasilkan subruang V1, maka vektor ini termasuk dalam ruang nol untuk V1.
Contoh (V1) adalah himpunan vektor 7-bit dari matriks penghasil kode (7,4) Hamming, dengan subruang nol (V2) dari vektor 7-bit yang membentuk matriks pemeriksaan paritas dari kode ini.
Jika dimensi subruang (V1) himpunan panjang n sama dengan k, maka dimensi subruang nol (V2) sama dengan n - k.
Jika V2 adalah subruang dari tupel dengan panjang n dan V1 adalah spasi nol untuk V2, maka (V2) adalah spasi nol untuk V1.
Misalkan U∩V menunjukkan kumpulan vektor milik U dan V, maka U∩V adalah subruang.
Misalkan U⊕V menunjukkan subruang yang terdiri dari kumpulan semua kombinasi linier dari bentuk a u + b v , di mana u є U, v є V, ab adalah bilangan.
Jumlah dimensi subruang U∩V dan U⊕V sama dengan jumlah dimensi subruang U dan V.
Misalkan U2 adalah subruang nol untuk U1 dan V2 ruang nol untuk V1. Maka U2∩V2 adalah ruang nol untuk U1⊕V1.
Kesimpulan
Makalah ini mempertimbangkan konsep dasar ruang vektor, yang sering digunakan dalam konstruksi model untuk analisis enkripsi, pengkodean dan sistem steganografi, proses yang terjadi di dalamnya. Jadi dalam standar enkripsi Amerika yang baru, spasi affine digunakan, dan dalam tanda tangan digital pada kurva elips, ruang affine dan
proyektif (untuk mempercepat pemrosesan titik kurva).
Kami tidak sedang membicarakan ruang-ruang ini dalam karya (Anda tidak dapat menggabungkan semuanya dalam satu tumpukan, dan saya juga membatasi volume publikasi), tetapi penyebutan ini tidak dibuat dengan sembarangan. Penulis yang menulis tentang sarana perlindungan, tentang algoritma sandi, secara naif percaya bahwa mereka memahami detail dari fenomena yang dijelaskan, tetapi pemahaman tentang ruang Euclidean dan propertinya ditransfer tanpa reservasi ke ruang lain, dengan properti dan hukum yang berbeda. Pembaca disesatkan tentang kesederhanaan dan aksesibilitas materi.
Gambaran palsu tentang realitas dibuat di bidang keamanan informasi dan peralatan khusus (teknologi dan matematika).
Secara umum, saya berinisiatif, betapa beruntungnya pembaca menilai.
literatur
1. Avdoshin S.M., Nabebin A.A. Matematika Diskrit. Aljabar modular, kriptografi, pengkodean. - M .: DMK Press, 2017. -352 hal.
2. Akimov O.E. Matematika diskrit Logika, kelompok, grafik - M .: Basis Lab. Zn., 2001.-352 hal.
3. Anderson D.A. Matematika diskrit dan kombinatorik), Moskow: Williams, 2003, 960 hal.
4. Teori pengkodean aljabar Berlekamp E.. -M .: Mir, 1971. - 478 hal.
5. Vaulin A.E. Matematika diskrit dalam masalah keamanan komputer. H 1- SPb.: VKA im. A.F. Mozhaisky, 2015.219 hal.
6. Vaulin A.E. Matematika diskrit dalam masalah keamanan komputer. H 2- SPb.: VKA im. A.F. Mozhaisky, 2017. -151 hal.
7. Gorenstein D. Kelompok sederhana hingga. Pengantar klasifikasi mereka. -M .: Mir, 1985. - 352 hal.
7. Graham R., Knut D., Ptashnik O. Matematika konkret. Dasar-dasar informatika.-M .: Mir, 1998.-703 hal.
9. Elizarov V.P. Cincin akhir. - M .: Helios ARV, 2006. - 304 hal.
Ivanov B.N. Matematika diskrit: algoritma dan program-M .: Lab.Baz. Pengetahuan., 2001.280 hal.
10. Yerusalimsky Ya.M. Matematika diskrit: teori, masalah, aplikasi-M .: Vuzovskaya kniga, 2000.-280 hal.
11. Korn G., Korn T. Buku Pegangan matematika untuk ilmuwan dan insinyur.-M .: Nauka, 1973.-832 hal.
12. Lidl R., Niederreiter G. Bidang terbatas: Dalam 2 volume.Vol. 1 -M .: Mir, 1988. - 430 hal.
13. Lidl R., Niederreiter G. Bidang terbatas: Dalam 2 volume.Vol. 2 -M .: Mir, 1988. - 392 hal.
14. Lyapin E.S., Aizenshtat A.Ya., Lesokhin M.M., Latihan tentang teori kelompok. - Moskow: Nauka, 1967.-264 hal.
15. Bergumam V.M. Dasar-dasar transmisi informasi anti-jamming. -L. Energoatomizdat, 1990, 288 hal.
16. Nabebin A.A. Matematika Diskrit. - M .: Basis Lab. Pengetahuan., 2001.280 hal.
17. Novikov F.A. Matematika diskrit untuk programmer. - SPb .: Peter, 2000.-304 hal.
18. Rosenfeld B.A. Ruang multidimensi.-M .: Nauka, 1966.-648 hal.
18. Hall M. Teori kelompok.-M .: Izd. IL, 1962. - 468 hal.
19. Shikhanovich Yu.A. Grup, cincin, kisi. - SPb .: Kirtsideli, 2006. - 368 hal.
20. Shneperman L.B. Kursus aljabar dan teori bilangan dalam masalah dan latihan: Dalam 2 jam Bagian 2.-Mn.: Vysh. shk., 1987.-256 hal.
21. Shneperman LB Kumpulan soal dalam aljabar dan teori bilangan - Minsk: Design PRO, 2000. -240 hal.