
Tapi pengembang senior melakukannya tahun lalu.
Anda mungkin ingat bahwa kami berbicara tentang bagaimana Anda dapat meningkatkan kinerja pemanen pertanian konvensional secara signifikan, jika Anda menggunakan jaringan saraf untuk mengenali tanaman dan rintangan serta robot untuk autopilot. Semua ini (kecuali untuk prosesor Nvidia dan beberapa perangkat keras lainnya) adalah pengembangan kami. Dan kegembiraannya adalah bahwa di beberapa wilayah selatan negara itu musim panen telah berakhir, dan kombinasi kami berkinerja lebih baik dari yang diharapkan. Puji para robot!
Tahun ini kami mengirimkan beberapa ratus blok dari inti grafis yang kuat (untuk jaringan saraf), kamera, pompa hidrolik atau modul CAN untuk kemudi. Jika tahun lalu percontohan pertanian dalam operasi uji coba, sekarang kita berbicara tentang model serial. Dan mereka berhasil.
Selain itu, mereka melakukannya lebih baik dari yang kami harapkan. Selain itu, tidak semua fitur disertakan dalam rilis tersebut. Faktanya, intinya tetap dalam rilis, tetapi ini saja memungkinkan kami untuk mendapatkan efek ekonomi yang sangat nyata.
Tentu saja, ada beberapa kejutan. Tapi mari kita lebih spesifik, dengan angka dan contoh.

Anda bisa melihat kamera 2 megapiksel dari atas. NVIDIA TX2 dalam casing khusus dan dengan heatsink besar dipasang di bawah di ruang sub-kabin. Layarnya ada di kokpit.

Tentang apa ini
Seorang pemanen pertanian memiliki kerumitan serupa dengan organ gereja. Ketika ada operator gabungan dan asisten di dalam kabin, satu kemudi (memegang tepi), dan yang kedua mengontrol reel, angin, drum, dan umumnya memantau koleksi. Orang ketiga saat ini dapat melakukan pengiriman saat bergerak ke truk yang bepergian di dekatnya. Keempat, mengamati rintangan. Di era Uni Soviet, ada dua di kokpit, lalu hanya satu. Akibatnya, dia mengarahkan atau mengumpulkan biji-bijian secara normal. Berdiri diam, biasanya tidak berhasil mengumpulkan biji-bijian, jadi dia mengemudi. Tentang bagaimana semuanya dipelintir dengan cerdik di sana dan mengapa menggabungkan orang secara teratur, menabrak traktor dan saluran listrik yang melintasi lapangan - pos pertama kami .
Ciri kedua adalah bahwa masing-masing peran, bahkan jika Anda melakukannya tanpa henti, sangat monoton dan membutuhkan kewaspadaan yang konstan. Ini seperti melihat trek selama 10 jam sehari, asalkan Anda perlu menangkap secara harfiah dua momen sehari ketika Anda membutuhkan reaksi cepat.
Fitur ketiga adalah bahwa pemanen gabungan sering kali lebih memilih memanen lebih cepat dengan efisiensi yang lebih rendah (karena pembayaran berlaku untuk ton yang dikirim), daripada mendapatkan gabah maksimum per hektar.
Seri ini mencakup fitur retensi tepi (pemanen itu sendiri memantau bagaimana ia mengemudi dan mengarahkan dirinya sendiri) dan penghindaran tabrakan (pemanen dengan hati-hati melihat sekeliling dan memprediksi pergerakan segala sesuatu yang dilihatnya - dari orang ke traktor). Di sini, perkembangan trem tak berawak setelah berkeliling VDNKh sangat bermanfaat. Lapangan jauh lebih tenang dengan rintangan. Tentang analitik video ada di sini...
Sebuah unit terpisah terlibat dalam melatih jaringan saraf (memotret situasi dan menandai data) untuk menentukan di mana tanamannya, seperti apa gandum yang jatuh, dan sebagainya. Karena tidak ada sampel pelatihan, kami pergi ke ladang dan menembak diri sendiri. Ini penting karena tanaman yang sama secara visual berbeda dari varietas ke varietas dan dari iklim ke iklim.
Divisi lain terlibat dalam pengembangan perangkat keras. Kami memiliki radar desain kami sendiri untuk lokomotif diesel dan trem, tetapi kombinasinya hanya memiliki kamera, karena mereka harus dilengkapi semurah mungkin. Cerita yang sulit adalah analisis protokol kontrol (terkadang hilang bersama dengan pabrikan, dan kemudian Anda perlu membalikkannya) atau pemasangan hidraulik untuk mencampur sinyal kami ke kemudi. Modul komputasi pada setiap kombinasi bersifat otonom.
Apa yang terjadi tahun ini
Bukan insinyur dan penguji terlatih khusus yang terjun ke lapangan, tetapi pekerja keras biasa, untuk siapa semua ini dikembangkan. Mereka memanen tanaman asli. Dan ya, mereka menguji sistem kami untuk kekuatan, seperti dalam lelucon tentang gergaji mesin.
Yang terpenting, kami takut bahwa pengguna akhir (penggabung) yang akan mengganggu implementasi, karena mereka akan merasakan ancaman terhadap pekerjaan mereka. Tapi semuanya berjalan baik. Mereka memahami batasan autopilot, memahami apa yang dibutuhkan di kokpit, memahami cara mengeluarkannya, dan apa yang sebenarnya dapat mereka lakukan dengan lebih baik. Produksi mereka meningkat, yang berarti pendapatan dari panen meningkat. Dan secara signifikan: sekitar 10-15%. Mereka ingin bekerja berpasangan dengan robot kami. Di pertanian yang sama, mereka memperebutkan mobil dengannya.
Orang tersebut benar-benar diturunkan. Dia menyalakan sistem, melepaskan roda kemudi, paling banter mengendalikan pengoperasian mobil, paling buruk - duduk di telepon. Minggu panen untuk operator gabungan adalah kerja-tidur-kerja-tidur-kerja. Prinsipnya, tidak ada kekuatan untuk apa pun, karena dalam sebulan Anda perlu menghasilkan selama enam bulan. Pilot kami mulai memberi tahu mereka bahwa mereka masih memiliki kekuatan untuk mengerjakan pekerjaan rumah. Mobil mulai terlihat lebih baik, karena setelah bekerja saya ingin tidak jatuh dan tertidur, tetapi mungkin untuk melakukan perawatan. Mereka yang sengaja memilih hari kerja yang lebih panjang mengatakan bahwa mudah untuk bekerja dua jam lebih. Mereka akan bekerja lebih keras, tetapi tidak pada malam hari: embun.
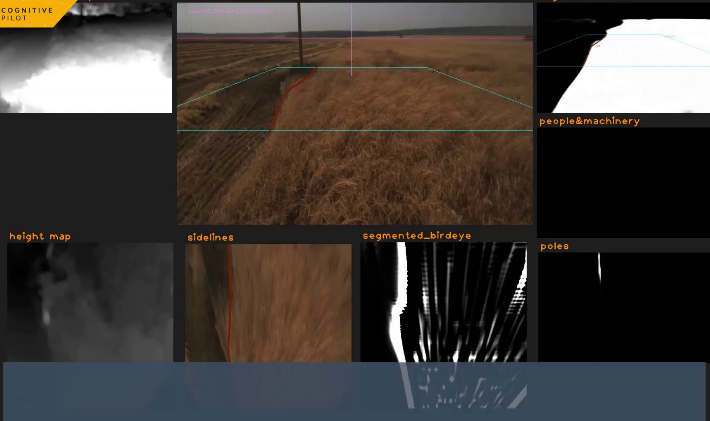
Berikut adalah beberapa gambar yang dilihat oleh operator mesin tetangga dari mobil mereka dan kemudian naik untuk melihat bagaimana semuanya bekerja:


“Duduk di sana, minum teh, bajingan! *** [Mengapa] dibutuhkan operator mesin sekarang? " Kemudian mereka melihat bahwa robot tersebut masih belum dapat melakukan segalanya, dan menyadari bahwa itu seperti kombinasi baru dengan beberapa fitur. Dan tenang.
Ada angka:
- Produktivitas shift waktu meningkat - pemanen tidak lelah. Ini mungkin tampak seperti keunggulan numerik 10-15%, tetapi ini jauh lebih menarik. Intinya adalah ini memberikan tiga hari ekstra untuk pembersihan. Ini berarti bahwa jika cuaca buruk (hujan lebat di mana biji-bijian bertunas atau hancur), tanaman tidak akan hilang, tetapi akan dipanen seluruhnya dengan kemungkinan yang jauh lebih besar.
- . , . , - , . 100 % . .
- . , - . , — , , .
- , . , . , ( 1,6 «» ).
- : , ( ). , .
Ternyata para operator dan manajer mesin dengan suara bulat mengatakan bahwa pekerjaan menjadi lebih mudah. Mereka yang tidak memiliki penjamah biji-bijian berpikir untuk membelinya sebagai tambahan. Perkebunan yang berbeda memiliki norma harian yang berbeda, biasanya 20-25 hektar. Kami melihat bahwa mereka dengan tenang bertaruh 30, dan orang-orang tidak kelelahan. Bagi beberapa orang, ini ternyata menjadi peluang untuk mengurangi armada pemanen untuk tahun depan: tidak perlu membeli dua atau tiga mesin. Saya tahu kedengarannya sangat aneh, tetapi dua peternakan (dari seratus) mengatakan mereka akan melakukannya.

Pemanenan dimulai dengan apa yang dicoba oleh German Gref di kelompok agraria Peschanokop (dalam jumlah besar) dan mengatakan bahwa dia menguasainya dalam tiga menit. Kami bangga dengan video ini. Jika presiden bank telah mengatasinya, maka pekerja keras di bidang pasti akan melakukannya.
Nah, jika tiba-tiba seseorang membebaskan beberapa ratus pejabat di wilayah tersebut, maka Anda dapat dengan cepat melatih mereka kembali menjadi operator peralatan. Pikirkan tentang itu. Rusagro menandatangani kontrak untuk 240 kendaraan. Banyak peternakan telah memesan perlengkapan pelengkap untuk seluruh taman tahun depan.
Bukan tanpa kejutan
Ngomong-ngomong, bagaimana para pria dengan cepat menguasai teknik tersebut. Peternakan mengambil empat set untuk diuji, kami tiba, memasangnya di mesin, dan melakukan commissioning. Kami belum sepenuhnya mengkalibrasi odometri, karena perlu cahaya matahari. Kami memutuskan untuk melakukannya di pagi hari. Di pagi hari, penginstal datang, dan orang-orang di mesin ini dengan pengaturan default telah memasuki lapangan, semuanya telah diinisialisasi dan mereka merekam apa yang dilakukan robot dari kabin. Itu bahkan mungkin aliran Instagram untuk sisa bidang. Di satu sisi, tentu saja, saya ingin melakukan kalibrasi, tetapi di sisi lain, senang bahwa para pria memulai semuanya sendiri dan semuanya naik ke pengaturan default.
Setelah hari-hari pertama di banyak peternakan, mereka mulai percaya pada robot kami, seperti kecerdasan mahakuasa seperti Terminator, atau sekadar menguji kekuatan. Dengan satu atau lain cara, satu peternakan memutuskan untuk mencoba membersihkan di malam hari. Terkadang orang berpikir bahwa robot harus berpikir seperti manusia. Kami sedikit kecewa karena kondisinya lebih buruk di malam hari. Faktanya adalah bahwa dalam rilis pertempuran tidak ada pembersihan malam: ini membutuhkan pelatihan tambahan dan algoritma pemrosesan data yang sedikit berbeda. Sejauh ini, kami menjamin pekerjaan malam normal hanya dengan penerangan yang cukup lebar (seperti pada gabungan asing tiga atau empat tahun yang lalu hampir di mana-mana), tetapi di sini penguji kami terjun ke lapangan pada gabungan domestik 16 tahun yang lalu dengan kerucut cahaya berkedip sempit di depan. Karena sebagian besar peternakan tidak melakukan pembersihan malam, kami menunda fitur ini untuk tahun depan.
Tempat kedua di mana ekspektasi terlalu tinggi adalah kondisi debu yang sulit. Misalnya, para pemanen, ketika saling mengikuti, menimbulkan awan debu. Angin terkadang sedemikian rupa sehingga embusan debu mengembuskan awan debu ke gabungan, yang berada di belakang. Karena dia tidak dipandu oleh radar yang mahal, tetapi oleh kamera biasa, dia tidak dapat melihat apa yang ada di depan. Jarak pandang di awan debu adalah enam meter. Pada saat-saat seperti itu, sistem kami berhenti melihat: sistem memberi sinyal kepada operator dan melepaskan kendali. Kami bahkan diberitahu bahwa lidar menolak. Tapi tidak ada lidar yang digabungkan. Operator mesin bersumpah: "Bagaimana dia tidak bisa melihat?" Pada akhirnya, inilah yang entah bagaimana menenangkan mereka tentang pekerjaan. Seseorang ingat dan mengerti: untuk menggabungkan - 10 meter, kami mengemudi dengan kecepatan ini dan itu, hembusan akan membawa dalam satu menit, tidak ada yang akan terjadi, jika lebih lama - kita harus bangun. Dan Pyotr Mikhalych pasti tidak akan berdiri di depan. Mungkin.Sistem tidak memiliki pengalaman hidup dan tidak mabuk dengan Mikhalych selama bertahun-tahun, jadi dalam hal ini ia menghentikan mobil dan melepaskan kendali. Jadi, sekali lagi, kecerdasan manusia mengalahkan bot tersebut.
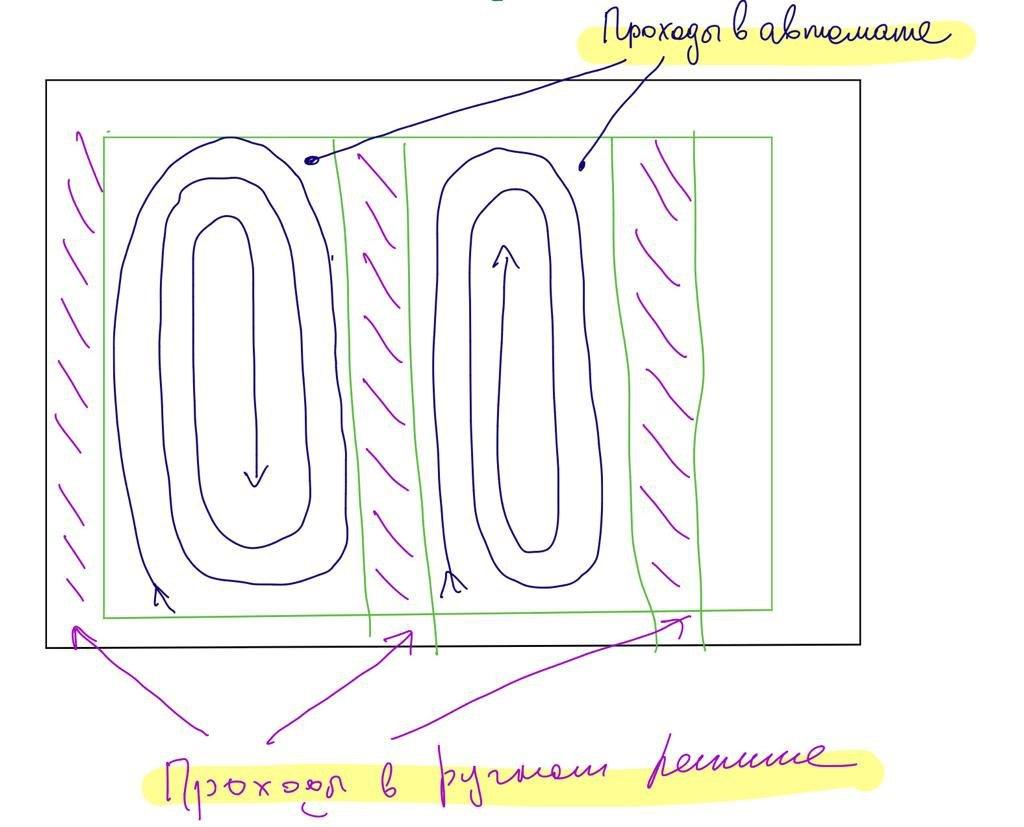
Rilis tidak termasuk rotasi otomatis. Ini adalah fitur yang sangat membuat kagum semua pemanen gabungan, tetapi ternyata ini yang paling sulit untuk diuji: dengan lebar tajuk yang besar, Anda perlu membangun banyak hipotesis tentang apa yang tidak terlihat. Setiap mesin memiliki karakteristiknya masing-masing. Selain itu, ini juga membutuhkan sistem kontrol yang kompleks untuk mengatur rute terlebih dahulu atau memprogramnya. Kami mendukung kontrol alami: Anda mengklik tombol di robot, Anda mengendarai mobil, Anda pergi ke lapangan, Anda mulai membersihkan. Robot itu berkata: "Man, biarkan saya menyetir," Anda mengklik tombol kedua - dan dia mengemudi. Anda perlu berbelok - lakukan saja, co-pilot melepaskan kontrol, lalu mencari keunggulan baru. Ketika dia menemukannya, dia meminta lagi untuk mengembalikan kendali. Semuanya intuitif dan sederhana. Akibatnya, kami mempercayakan orang untuk berbelok di antara gang.Dengan otomatisasi, kami menunggu akhir pengujian di medan yang sulit. Biasanya, jarak mengemudi hingga lima kilometer, artinya, belokan itu sendiri memakan waktu kurang dari 1% dari waktu pengoperasian gabungan.
Hanya ada satu kamera di pemanen, karena yang diutamakan adalah harga. Yang kedua tidak terlalu meningkatkan harga, tetapi sangat meningkatkan beban komputasi, dan unit komputasi dengan 4 Tflop merupakan bagian besar dari biaya perangkat keras. Kamera melihat ke kiri di header. Ada beberapa skema eksotis (jarang digunakan di Federasi Rusia), ketika segala sesuatu yang menarik terjadi tidak hanya di kiri, tetapi juga di kanan. Secara umum, kami memiliki dua sistem pembersihan utama: dayung dan pesawat ulang-alik. Bekerja dengan sebuah tikungan: sepotong bidang terpotong, dan segala sesuatu di sekitarnya dipotong menjadi persegi panjang atau lingkaran yang meruncing, berusaha menuju ke tengah. Karenanya, kami melakukannya berlawanan arah jarum jam. Dengan pesawat ulang-alik: dari satu sisi mereka memanggil dan mengemudi bolak-balik - seperti pada printer. Jalur kosong terbentuk di antara penetrasi, tetapi Anda dapat mengambil bagian dalam bentuk apa pun. Jadi, untuk bidang berbentuk kompleks ada skema yang lebih dioptimalkan,yang membutuhkan melihat ke dua arah. Mungkin, di salah satu rilis berikutnya kami akan menawarkan peralihan antar kamera.

Skema "Kanada".
Kemudian - mengedit. Di tengah musim panas, di tengah karantina, gabungan kami untuk pertama kalinya sejak tahun lalu tiba-tiba melihat dan memperhatikan semuanya. Lebih tepatnya, mereka mungkin menyadarinya pada tahun itu, tetapi mereka mulai memesan kit tepat sebelum panen (ini mungkin karena pinjaman ke pertanian dengan jangka pendek). Akibatnya, kami melakukan perjalanan keliling negeri dalam kondisi karantina, yang meninggalkan jejak unik pada karya spesialis di jaringan saraf. Para installer duduk di suatu tempat selama 14 hari, di suatu tempat mereka berjalan hampir dengan pakaian antariksa, tetapi mereka berhasil menangani 50 pertanian (dan masih ada yang sama).
Kami menghadapi kesulitan teknis: pada beberapa model asing (dan satu Rusia), tata letak kompartemennya sangat padat. Perbedaannya adalah bagaimana antara melihat di bawah tenda Zhiguli dan melihat ke MacBook. Dimensi dikirim dari lapangan, kami segera memesan braket baru atau sistem pemasangan baru untuk model tertentu.
Karena pandemi, pemasok peralatan pun berubah. Badan katup berasal dari pabrikan Jerman. Mereka memberi tahu kami pada bulan Maret: "Kembalilah dalam empat bulan." Kepanikan, karena keseluruhan cerita bergantung padanya. Kami menemukan pabrikan Rusia, mereka memahami segalanya, ternyata santai dan menjadikan kami hidraulik. Seketika, tapi juga bukan tanpa kejutan dan bukan tanpa rasa gugup saat mengatur tugas tentunya. Tetapi hingga tahun ini, kami sama sekali tidak percaya bahwa hal ini mungkin terjadi di Rusia.
Apa berikutnya
Robot memanen sereal: gandum, barley, oat, gandum hitam di wilayah selatan. Belum ada operasi serial pada jagung dan bunga matahari (ini nanti dalam istilah agronomi). Kami juga tertarik dengan rapeseed dan kedelai. Pemerkosaan adalah Rusia Tengah, sementara kami menunggu panen di sana. Kedelai - Siberia, Altai, Siberia selatan, Wilayah Khabarovsk, ini sebentar lagi.
Promosi dari mulut ke mulut tidak berhenti. Selama satu setengah bulan terakhir, sekitar selusin kepemilikan yang sangat besar dari 50 kepemilikan pertama telah datang dengan permintaan khusus mereka sendiri. Beberapa sudah membeli alat uji untuk panen ini. Seseorang membuat TK kami sendiri dan keinginan khusus untuk kami - kami akan berpikir di luar musim. Tugasnya adalah mengikat pemantauan hasil (gabungan menghitung butir dalam telemetri dan melihat koordinat, yaitu, Anda dapat mengambil data tentang hasil petak tanah hingga satu meter), memantau operasi gabungan (mengirim telemetri ke pusat). Beberapa pertanian hanya datang ke gambar, bagi banyak pertanian penting untuk rotasi tanaman yang titik kritis di ladang ditandai. Penting untuk memahami hasil rata-rata tahunan dan menilai "uang tunai" setiap tahun. Analisis diperlukan untuk memahami secara kasar pemuatan traktor dan peralatan: beli atau kurangi.Ada banyak perbedaan dalam memesan bahan bakar dan pelumas sebelum musim: ini semua adalah pembayaran di muka yang tidak menyenangkan. Seperti yang dikatakan seorang kepala perusahaan besar: “Kami bekerja dengan pasar. Kami tidak mengontrol pasar. Untuk mendapatkan lebih banyak, kami hanya dapat mengurangi biaya. Jika kita tidak menguranginya, mereka akan memakan kita dengan bodoh. "
Jangka hidup dari gabungan tersebut adalah 10–12 tahun (tetapi sering kita lihat 2005, tahun ini bahkan ditetapkan untuk 2001). Kami akan memperbaiki semuanya. Karena selama kuda masih hidup, mereka menungganginya. Ketika biaya perbaikan menjadi lebih mahal daripada biaya perbaikan baru, mereka mengambil yang baru. Ini berakhir dengan fakta bahwa kombinasi lama menjadi donor suku cadang untuk orang lain yang sejenis. Ya, ini adalah hati yang kendur dan kaki patah, tapi bisa bekerja selama satu atau dua tahun. Kemudian semuanya membusuk.
Dan hal hebat lainnya adalah umpan balik bahwa dengan ekonomi ini, kombinasi menghasilkan lebih cepat. Sebuah mobil berharga, misalnya, 25 juta rubel (tergantung pabrikan dan modelnya). Pertanian percaya: lima tahun - untuk mobil domestik, mobil asing terbayar dalam delapan tahun. Sekarang - sekitar minus satu tahun.
Sekarang kita akan menyelesaikan pembersihan tahun ini pada model serial dan beberapa model eksperimental, kita akan menyatukan ekonomi dan akan dipublikasikan dalam tinjauan ekonomi internasional. Modul kami akan dipasang baik dalam bentuk ini - kotak terpisah pada pemanen, dan modul tersebut akan dimasukkan dalam bentuk perangkat terintegrasi pada pemanen baru, jika semuanya berakhir dengan baik. Kita berhasil. Dua setengah tahun kehidupan tim tampaknya sedikit mengubah dunia.
NB Jika ahli agronomi Anda tidak ada di Habré, dan dia tertarik, Anda dapat menemukan kontak di sini: promo.cognitivepilot.com dan diskusikan secara mendetail kombinasi mana, perangkat khusus apa yang diperlukan, berapa biayanya, dan bagaimana Anda dapat melihatnya dengan cepat - pengalaman.
PS