Mengapa saya memutuskan untuk menulis posting ini?
Tentu saja, Anda dapat melihat petunjuk asli untuk menginstal ROS Noetic di ROS Wiki , tetapi semuanya dalam bahasa Inggris dan dijelaskan dengan sangat samar, tetapi saya akan mencoba menjelaskannya kepada Anda sejelas mungkin. Jadi, mari kita mulai.
Apa itu ROS?
ROS - Sistem Operasi Robot, kerangka kerja untuk robot pemrograman, menyediakan fungsionalitas untuk pekerjaan terdistribusi. ROS awalnya dikembangkan pada tahun 2007 dengan nama switchyard di Lab Kecerdasan Buatan Universitas Stanford.
Bisakah ROS Noetic diinstal pada versi Ubuntu lainnya?
Tidak ada jawaban yang benar untuk pertanyaan ini. Tampaknya paket Noetic individu dapat diinstal pada versi lain dari sistem operasi, tetapi stabilitasnya tidak dijamin. Oleh karena itu, kemungkinan besar semuanya tidak. Jadi mari kita turun ke instalasi itu sendiri.
Bagaimana jika saya menggunakan versi Ubuntu yang berbeda
ROS telah dikembangkan dalam versi berbeda yang diinstal pada versi Ubuntu yang berbeda.
Versi Ubuntu |
Versi ROS |
Ubuntu 15.04 & 16.04 |
Ros kenetic |
Ubuntu 18.04 |
ROS Melodic |
Ubuntu 20.04 |
ROS Noetik |
ROS Ubuntu? ! noetic , ros-noetic
, ros-melodic
.
, :
Main - , Canonical.
Universe - , .
Restricted - .
Multiverse - , .
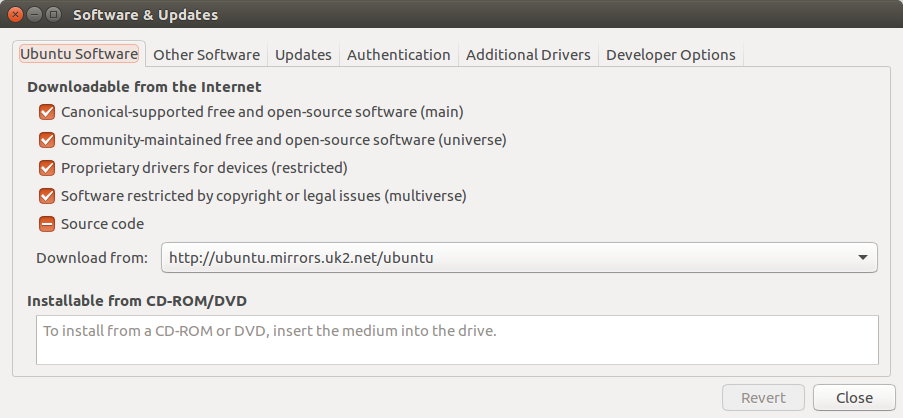
, . " Ubuntu" "Ubuntu Software" ,
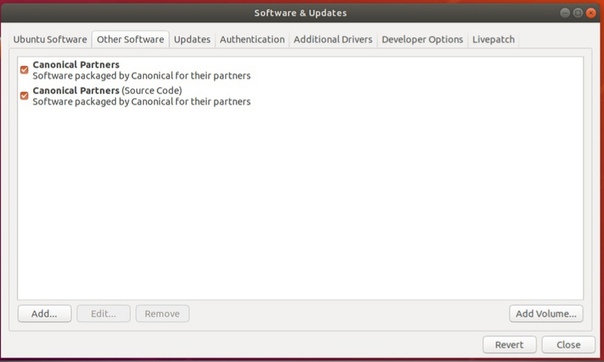
"Other sowtware" Canonical Parthners Canonical Parthners(source code)
ROS
ROS Noetic
1
. packages.ros.org . :
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
. :
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl apt-key, , -:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
2
-
sudo apt-get update
3
. , ROS :
Desktop Full - , . , : 2D/3D . , :
sudo apt install ros-noetic-desktop-full
2. Desktop Instal - ROS, rqt rviz.
sudo apt install ros-noetic-desktop
3. ROS-Base: (Bare Bones) - ROS. , . :
sudo apt install ros-noetic-ros-base
- ROS :
sudo apt install ros-noetic-_
4
bash, ROS. :
source /opt/ros/noetic/setup.bash
5
, ROS. ROS , . , rosinstall - , ROS . :
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6
Sebelum Anda dapat menggunakan banyak alat ROS, Anda perlu menginisialisasi rosdep . Ini memungkinkan Anda untuk dengan mudah menginstal dependensi sistem untuk kode sumber yang ingin Anda kompilasi dan diperlukan untuk menjalankan beberapa komponen inti di ROS. Jika Anda belum menginstal rosdep , sekarang saatnya menginstalnya. Untuk melakukan ini, tulis di terminal:
sudo apt python3-rosdep
Langkah 7
Untuk menginisialisasi rosdep, tulis di terminal:
sudo rosdep init
Dan kemudian kami menulis yang berikut ini:
rosdep update
TOTAL
Selamat telah menginstal ROS Noetic. Sekarang Anda dapat mulai memprogram robot Anda sendiri menggunakan ROS.