
Kelelawar tapal kuda yang lebih kecil
Proyek ini menggambarkan penciptaan yang disebut. detektor kelelawar - perangkat yang memungkinkan Anda mendengar dan merekam suara yang dibuat oleh kelelawar. Anda mungkin sadar bahwa kelelawar mengeluarkan suara ultrasonik untuk ekolokasi. Frekuensi suara tersebut berada di luar jangkauan yang dapat dilihat oleh telinga manusia, sehingga tidak dapat didengar secara langsung. Detektor kelelawar menggunakan mikrofon khusus yang mampu menangkap suara frekuensi tinggi ini dan mengubahnya menjadi suara yang berada dalam jangkauan yang dapat didengar.
Ada tiga jenis detektor kelelawar . Untuk diriku sendiri, aku membuat heterodynedetektor. Kekurangannya adalah membuat lebih sulit untuk membedakan berbagai jenis kelelawar jika dibandingkan dengan merekam suara frekuensi tinggi. Saya akan menjelaskan nanti bagaimana detektor heterodyne bekerja, tetapi pertama-tama mari kita lihat mikrofon yang diperlukan untuk merekam ultrasound.
Saat memilih mikrofon, pada awalnya saya mempertimbangkan dua opsi:
- mikrofon elektret - semua yang saya temukan, menurut dokumen, hanya berfungsi dalam kisaran 10 hingga 20 kHz, tetapi jika Anda mempercayai beberapa sumber daya, beberapa jenis mereka juga merasakan ultrasound sampai batas tertentu. Namun, karena deskripsi resmi mereka tidak menunjukkan hal ini, maka perlu banyak trial and error untuk memeriksa berbagai merek dan mencobanya. Jadi saya menyerah pada jenis mikrofon ini.
- sensor piezoelektrik... Mereka, misalnya, ditemukan di pengukur jarak ultrasonik HC-SR04 yang populer, yang ada di mana-mana dan murah. Kelemahannya adalah sensitivitasnya sangat dekat dengan frekuensi resonansi, sekitar 40 kHz. Dan saat menjauh dari frekuensi ini, sensitivitas turun tajam. Jadi mereka juga tidak cocok.
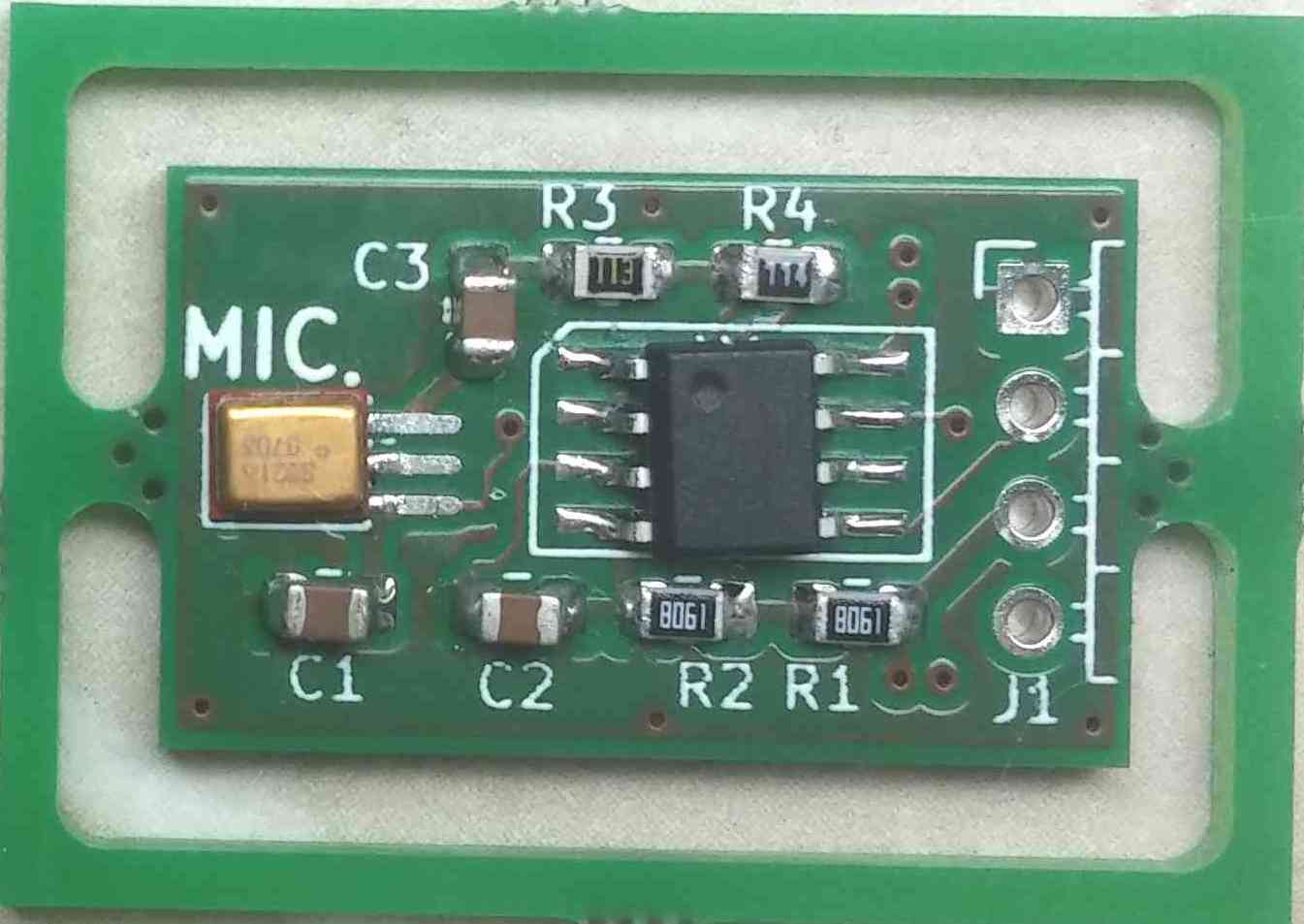
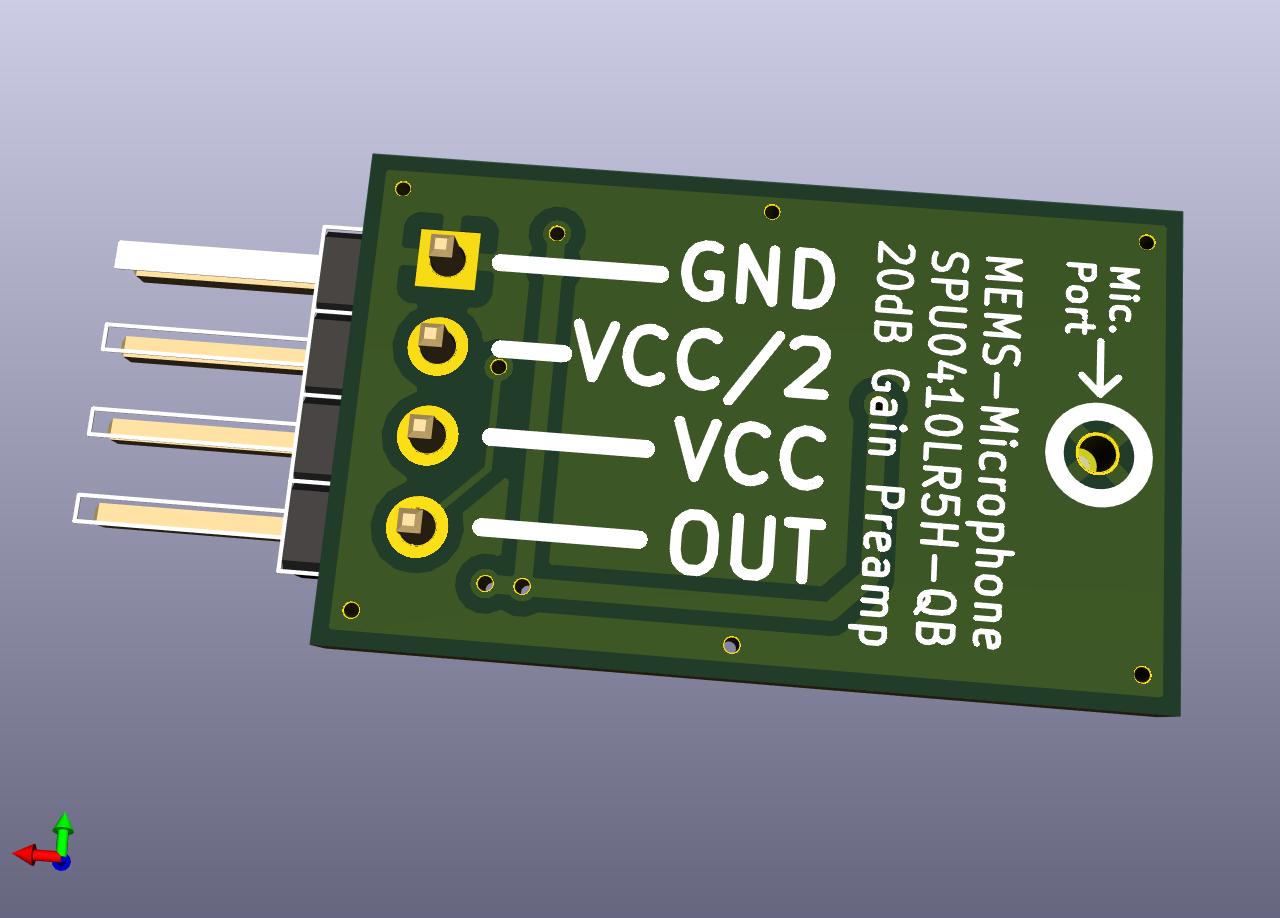
Sebagai gantinya, saya akhirnya menemukan mikrofon Knowles SPU0410LR5H , mikrofon jenis MEMS... Menurut spesifikasinya, mikrofon ini memiliki kurva respon yang cukup datar di semua frekuensi hingga 80 kHz, sehingga sangat cocok untuk proyek ini. Selain itu, ia memiliki preamplifier S / N internal yang tinggi. Kerugian utama dari mikrofon ini adalah housingnya tidak dimaksudkan untuk proyek buatan sendiri. Ini kecil (3,76 x 3 mm!), Dan kontaknya ada di dalam casing. Saya mencari di Internet, dan menemukan halaman pengguna hackaday.io Alan Green, yang juga menggunakan mikrofon ini dalam proyeknya. Dia datang dengan ide yang bagus untuk membuat papan khusus untuk mikrofon ini, sehingga bisa disolder secara manual. Kuncinya adalah memanjangkan bantalan agar menonjol keluar dari komponen. Saya mengambil ide ini dan merancang papan kecil untuk mikrofon dan op amp ganda. Yang terakhir menyediakan pembumian virtual (pada setengah tegangan suplai), serta tahap penguat 20 dB (yaitu, 10 kali). Awalnya saya ragu untuk menyolder mikrofon ini dengan tangan, tetapi semuanya bekerja dengan baik - semua 6 papan yang saya solder berhasil. Saya merekam video penyolderan untuk klarifikasi. Desain papan juga dipublikasikan .

Mari kita mulai menjelaskan prinsip pengoperasian detektor kelelawar heterodyne. Mari kita mulai dengan melihat sinyal yang dipancarkan oleh tikus. Mereka dapat dimodelkan sebagai sinyal pembawa frekuensi ultrasonik termodulasi amplitudo dan sinyal amplop seperti "kicauan" pendek adalah sinyal (sinyal dengan modulasi frekuensi linier ).
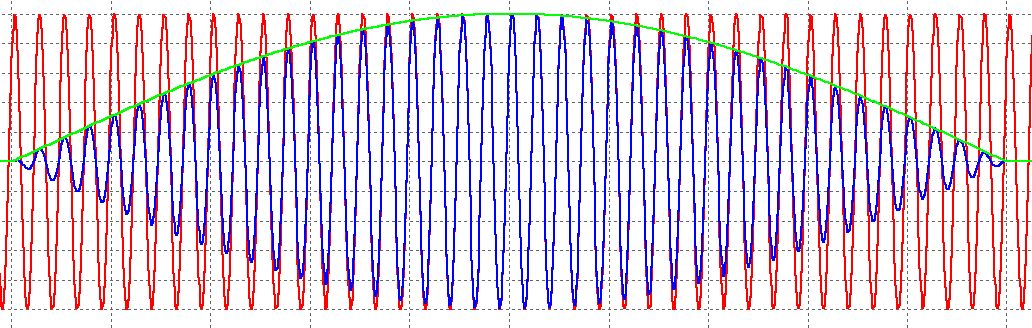
Dalam diagram ultrasound, pembawa ditampilkan dengan warna merah, amplop kicauan ditunjukkan dengan warna hijau, dan jumlah total ditunjukkan dengan warna biru. Untuk menerjemahkan sinyal ke dalam rentang yang dapat didengar manusia, Anda perlu mengubahnya untuk mempertahankan amplop (kicauan), memodulasi dengan sinyal pembawa dengan frekuensi yang lebih rendah (misalnya, dalam kisaran 1-5 kHz). Bagaimana ini bisa dicapai?
Untuk memahami bagaimana ini dilakukan dari sudut pandang matematika, kami menggunakanidentitas trigonometri yang diketahui :
2sin (x) ⋅sin (y) = cos (x - y) −cos (x + y)
2cos (x) ⋅cos (y) = cos (x - y) + cos (x + y)
2sin (x) ⋅cos (y) = sin (x - y) + sin (x + y)
2cos (x) ⋅sin (y) = - sin (x - y) + sin (x + y)
Jika kita ambil model sinyal kelelawar, dapat dimodelkan sebagai berikut:
pembawa (t) = sin (2πf c t)
kicauan (t) = sin (2πf kicauan t)
kelelawar (t) = pembawa (t) ⋅ kicauan (t)
dimana frekuensi ultrasonik carrier - f c , dan frekuensi sinyal chirp - f chirp . Untuk contoh ini, asumsikan:
f c = 40 kHz
f chirp = 1 kHz
Menerapkan identitas trigonometri, kita dapatkan:
bat (t) = sin (2πf c t) ⋅sin (2πf chirp t) = 1/2 cos (2π (f c −f chirp ) t) - 1/2 cos (2π (f c + f chirp ) t)
Sinyal termodulasi terdiri dari dua frekuensi yang secara simetris terletak di sekitar frekuensi pembawa, dalam contoh ini
40 kHz - 1 kHz = 39 kHz
40 kHz + 1 kHz = 41 kHz
Ini adalah LSB bawah dan sideband USB atas :
f LSB = f c −f kicauan
f USB = f c + f kicauan
Sekarang kita dapat menggunakan prinsip yang sama untuk mengubah sinyal mouse ke frekuensi yang lebih rendah dan dapat didengar. Untuk melakukan ini, Anda perlu mengalikan sinyal dengan frekuensi generator LO lokal - ini adalah perbedaan antara frekuensi pembawa sinyal dan frekuensi pembawa yang diinginkan (dalam kasus kami, frekuensi terdengar di mana kami ingin mendengar teriakan kelelawar). Teknik ini disebut heterodyning. Dalam contoh kita, misalkan kita ingin mendengar jeritan tikus pada frekuensi 5 kHz, yang terdengar jelas oleh manusia. Maka:
f target = 5 kHz
f LO = f c −f target = 35 kHz
LO (t) = sin (2πf LO t)
Gabungkan semuanya, kita dapat menulis ulang suku-suku persamaan tersebut menggunakan identitas trigonometri:
bat (t) ⋅LO (t) = (1/2 cos (2πf LSB t) −1/2 cos (2πf USB t)) ⋅sin (2πfLOt)
= 1 / 2cos (2πf LSB t) ⋅sin (2πf LO t) - 1 / 2cos (2πf USB t) ⋅sin (2πf LO t)
= 1/4 (sin (2π (f LO −f LSB ) t) + sin (2π (f LO + f LSB ) t) - sin (2π (f LO −f USB ) t) - sin (2π (f LO + f USB ) t))
(mengingat sin (−x) = - sin (x)),
= 1/2 (−1 / 2sin (2π (f LSB −f LO) t) + 1 / 2sin (2π (f USB −f LO ) t) + 1 / 2sin (2π (f LSB + f LO ) t) - 1 / 2sin (2π (f USB + f LO ) t))
= 1/2 (−1 / 2sin (2π (fc - f LO -f chirp ) t) + 1 / 2sin (2π (fc - f LO + f chirp ) t) + 1 / 2sin (2π (fc + f LO - f chirp ) t) - 1 / 2sin (2π (fc + f LO + f chirp ) t))
= 1 / 2cos (2πf target t) ⋅sin (2πf chirp t) + 1 / 2cos (2πf 2 t) ⋅sin (2πf chirp t)
Dapat dilihat bahwa suku pertama, cos (2πf target t) ⋅sin (2πfchirp t) persis seperti yang kita inginkan, sebuah chirp envelope dimodulasi dengan frekuensi suara 5 kHz. Istilah kedua lagi-lagi merupakan sinyal kicauan yang dimodulasi pada frekuensi yang lebih tinggi, f 2 = f c + f LO , dalam hal ini 75 kHz. Komponen kedua berada jauh dari jangkauan yang dapat didengar dan dengan mudah dipotong oleh filter high-pass di sirkuit detektor kelelawar.
Sekarang setelah kita memiliki pemahaman teoretis tentang bagaimana prinsip heterodyning dapat digunakan untuk membuat detektor kelelawar - bagaimana kita mempraktikkannya? Hal utama adalah mengalikan sinyal input dengan sinyal LO, yang dalam praktik elektronik tidak mudah dilakukan. Ada sirkuit untuk perkalian analog (misalnya, sel Gilbert), dan kita dapat menggunakan IC yang sesuai (seperti NE612 ) bersama dengan generator gelombang sinus (misalnya, generator jembatan Wien ). Namun, solusi seperti itu akan sulit, dan IC untuk perkalian analog seperti NE612 atau sejenisnya jarang dan mahal.
Ternyata ada opsi yang lebih sederhana, dan dapat dirakit dari komponen standar umum. Kita dapat merakit mixer frekuensi dengan pengalih analog. Meskipun ini bukan pencampur yang ideal, karena ini tidak benar-benar menggandakan kedua sinyal, kita akan segera melihat bahwa ini masih bekerja dengan cukup baik.
Untuk saat ini, mari kita lihat diagramnya dan coba cari tahu cara kerjanya.
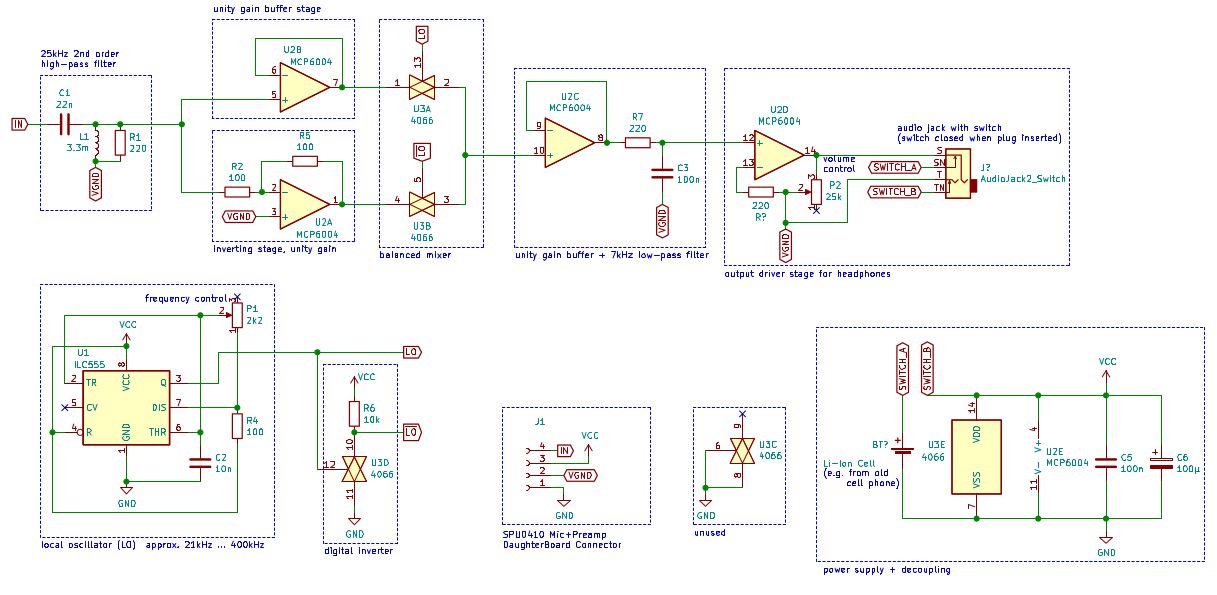
Di sebelah kiri dalam diagram, output mikrofon diumpankan ke filter LC high-pass urutan kedua, yang menghilangkan frekuensi yang dapat didengar di bawah 20 kHz, dan hanya memungkinkan ultrasound untuk melewatinya (karena inilah yang kami butuhkan). Resistor R1, sejajar dengan induktor, diperlukan - ini meredam resonansi.
Setelah filter high-pass, sinyal datang ke dua tahap penguat operasional, dengan koefisien 1 dan -1 (yaitu, membalikkan sinyal). Kami sekarang memiliki sinyal mouse dan pasangannya yang terbalik.
Di kiri bawah diagram, Anda dapat mengenali multivibrator bistable dengan IC 555 yang terkenal... Potensiometer P1 dapat memantau seluruh rangkaian dan membuat gelombang persegi dengan ~ 50% siklus kerja dan frekuensi variabel dari 20 kHz hingga 400 kHz. Dalam kasus kami, ini akan menjadi sinyal osilator lokal LO, tetapi tidak seperti model matematika kami, gelombang ini persegi, bukan sinusoidal. Sinyal LO tiba pada tahap pembalik yang terdiri dari sakelar analog U3D dan resistor R6. Di sini sakelar analog digunakan sebagai inverter digital, dan karena IC CD4066 memiliki 4 sakelar analog, kami memiliki dua sakelar cadangan, salah satunya dapat digunakan sebagai inverter, dan menghemat komponen. Ini bekerja secara sederhana: jika sinyal LO rendah, sakelar terbuka, dan R6 menarik sinyal keluaran dari sakelar ke atas. Jika sinyalnya tinggi, kunci ditutup, dan output dari kunci dihubungkan ke ground. Beginilah cara mendapatkan sinyal terbalik....
Sekarang mari kita lihat bagian dari sirkuit yang berlabel "mixer seimbang". Sinyal mouse non-terbalik diumpankan ke sakelar analog yang mengontrol sinyal LO. Sinyal terbalik diumpankan ke kunci lain, yang mengontrol sinyal... Output kunci terhubung. Apa yang dilakukan bagian sirkuit ini?
Mari pertimbangkan kasus di mana sinyal LO adalah 0 (rendah) dan oleh karena itu sinyalnya1 (tinggi). Dalam hal ini, kunci bawah U3B ditutup dan kunci atas U3A terbuka. Oleh karena itu, sinyal mouse terbalik lewat. Dalam kasus sebaliknya, ketika sinyal LO adalah 1 (tinggi), maka sinyal tersebut0 (rendah)., U3B kunci bawah terbuka dan U3A atas ditutup. Kemudian sinyal non-terbalik lewat. Ingatlah bahwa switching ini terjadi pada frekuensi f LO yang ditentukan oleh loop timer 555.
Dapatkah perilaku ini dimodelkan secara matematis? Intinya, rangkaian mixer ini mengalikan sinyal dengan gelombang persegi yang beralih antara +1 dan -1. Ini setara dengan mengalihkan sinyal keluaran antara terbalik dan non-terbalik. Gelombang seperti itu (sebut saja r (t)) dapat dijelaskan oleh apa yang disebut. dengan fungsi tanda (x):
Oleh karena itu, pada output mixer, kami memperoleh produk bat (t) ⋅r (t). Dengan sendirinya, ini belum menjelaskan apa pun - untuk memahami bagaimana pencampuran frekuensi terjadi, kita perlu menerapkan sihir matematika yang disebut perluasan deret Fourier. Saya akan memberi Anda kesimpulan dan segera memberikan hasilnya. Nyatanya, dengan menggunakan deret Fourier, kita dapat menunjukkan bahwa:

Jadi gelombang persegi kita + 1 / -1 terdiri dari himpunan sinusoid tak terhingga dengan frekuensi dasar f LO dan faktor ganjilnya. Apa selanjutnya dari ini? Jika Anda mengabaikan konstanta 4 / π, Anda dapat melihat bahwa r (t) adalah jumlah LO (t) dan tambahan frekuensi tinggi lainnya LO 3 (t), LO 5 (t), dan seterusnya. Dari perhitungan sebelumnya kita telah menunjukkan bahwa:

Oleh karena itu dapat dihitung bahwa:
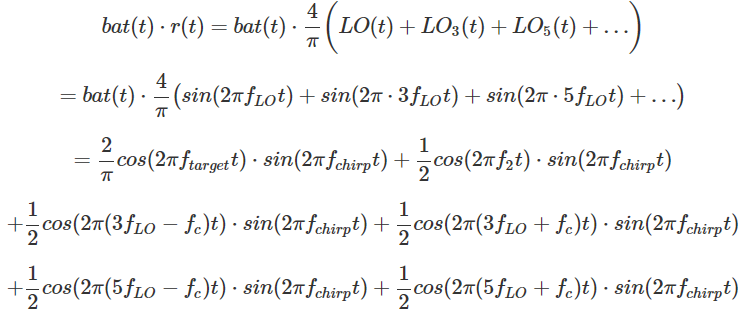
Kita melihat lagi bahwa suku pertama 2 / π cos (2πf target t) ⋅sin (2π f chirp t) adalah yang kita inginkan, namun dengan mixer switchable analog yang tidak sempurna, kita berakhir dengan sekelompok suku lain yang tidak perlu. Namun, semua komponen frekuensi yang tidak perlu ini memiliki frekuensi yang jauh lebih tinggi daripada target f target kita . Oleh karena itu, kita dapat menggunakan filter high-pass untuk menghilangkan komponen ini, dan mendapatkan sinyal akhir yang kira-kira sama dengan 2 / π cos (2π f target t) ⋅sin (2π f chirp t).
Jika kita kembali ke rangkaian, maka output dari mixer datang ke tahap penyangga, dan kemudian ke filter RC low-pass dengan frekuensi kopling ~ 7 kHz. Tahap penguat terakhir memberikan penguatan yang dapat disesuaikan dan berfungsi sebagai driver keluaran (misalnya, headphone).
Untuk lebih memahami cara kerja pencampuran frekuensi, saya membuat simulator sirkuit di LTSpice . Anda dapat mengunduh file simulasi dan memainkannya.
Beberapa catatan tentang komponen. Saya ingin seluruh sirkuit ditenagai oleh satu baterai lithium-ion karena saya memiliki banyak baterai dari ponsel lama dan sejenisnya. Oleh karena itu, seluruh rangkaian harus beroperasi dengan catu daya dari 3 hingga 4 V. Oleh karena itu, pewaktu 555 dan sakelar analog 4066 harus dipilih sebagai CMOS - mereka sudah berjalan pada 3 V. Saya menggunakan CD4066B dan ILC555. Sebuah quad op-amp juga harus beroperasi pada tegangan rendah; Saya memilih MCP6004 yang sering saya gunakan.
Saya tidak meletakkan papan, saya menyolder semuanya di papan tempat memotong roti. Jika Anda ingin membuat perangkat Anda sendiri dengan papan, unduh diagram untuk KiCAD... Saya mencetak kasing untuk perangkat dan kenop untuk menyesuaikan volume dan frekuensi pada printer 3D. Daya akan menyala secara otomatis saat Anda memasukkan headphone ke jack. LED merah berkedip menunjukkan daya hidup. Papan mikrofon terletak di dalam casing di belakang lubang kecil (gambar di sebelah kanan).

Untuk mengkalibrasi skala frekuensi, saya memeriksa output 555 pada osiloskop dan menandai frekuensi pada kasing. Kemudian saya menggambar timbangan di komputer dan mencetaknya.
Dan inilah yang telah kita semua tunggu-tunggu. Seperti apa suara kelelawar pada detektor? Saya menawarkan Anda rekaman satu fragmen yang saya rekam sekitar pukul 10 malam ketika saya melihat LM terbang di sebelah lentera di taman. Frekuensi disesuaikan menjadi 40-45 kHz.
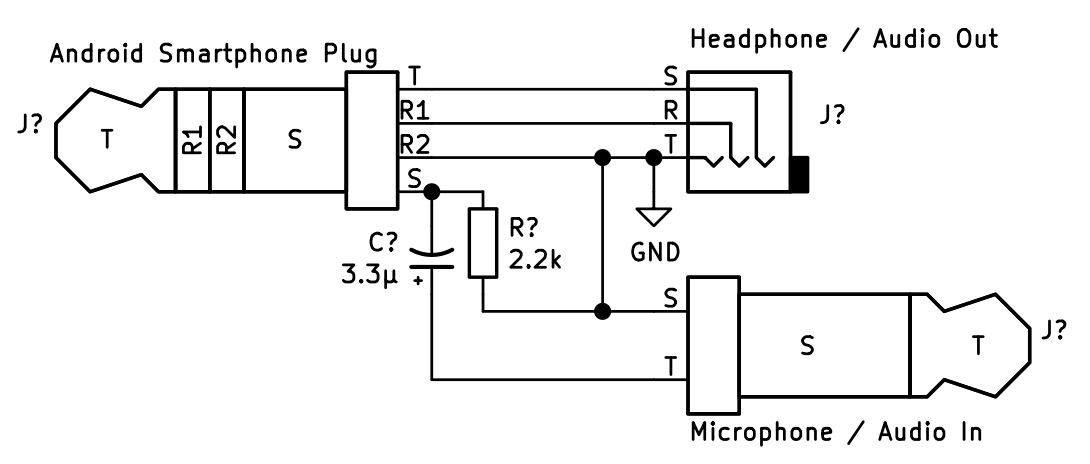
Untuk merekam suara, saya memegang ponsel cerdas saya di samping headphone detektor, tetapi sepertinya sangat konyol, jadi saya memutuskan untuk mencari opsi yang lebih baik. Ternyata sebagian besar smartphone memiliki input mikrofon di jack headphone - Anda hanya perlu menggunakan pin 3,5 mm dengan 4 kontak. Oleh karena itu, saya mengembangkan adaptor yang memungkinkan detektor dihubungkan ke input mikrofon smartphone, dan headphone ke output headphone smartphone. Agar smartphone mengenali bahwa mikrofon telah dicolokkan, diperlukan resistor 2,2 kΩ, dan kapasitor 3,3 μF diperlukan untuk memisahkan sinyal.

Saya juga harus mencari aplikasi yang bisa merekam dan memutar audio pada saat bersamaan sehingga saya bisa mendengarkan suara yang direkam secara real time. Saya senang dengan aplikasi RecForge II , meskipun mungkin ada yang lain.
Jika Anda ingin merakit detektor LM heterodyne Anda sendiri dan membutuhkan mikrofon MEMS ultrasonik siap pakai, Anda dapat menemukannya di sini:
Tidak ada op-amp pada papan ini, jadi Anda harus membuatnya juga. Bahan-bahan lainnya akan mudah ditemukan di toko favorit Anda.
Lihat juga: