Prosesor neuromorfik, dibangun di atas prinsip interaksi neuron, menunjukkan hasil terbaik di bidang jaringan saraf tiruan / tugas-tugas mesin vision. Namun, mereka jauh dari meniru proses yang terjadi di otak. Salah satu dari banyak alasannya adalah astrosit, sel glia yang paling melimpah.
Mereka dianggap memiliki fungsi pendukung untuk neuron, tetapi penelitian dalam beberapa dekade terakhir menunjukkan bahwa jenis sel ini melakukan lebih dari sekadar mengisi ruang antar neuron, seperti yang diyakini para peneliti selama lebih dari satu abad. Penelitian menunjukkan bahwa sel-sel ini juga memainkan peran kunci dalam fungsi otak, termasuk pembelajaran dan pembentukan pola sentral (CPG), yang menjadi dasar untuk perilaku ritmis seperti bernapas dan berjalan.
Kontra solusi neuromofilik yang ada
Asumsi bahwa pembelajaran hanya terjadi dengan koneksi yang kuat antara neuron adalah salah. Faktanya, pembelajaran dan memori seimbang secara optimal dalam jaringan yang
beroperasi secara makroskopis di ambang kekacauan , mode dinamis sempit
sebagian besar diabaikan dalam algoritme pembelajaran, tetapi juga dimanifestasikan oleh otak.
Untuk sebagian besar, solusi neuromorfik kekurangan kombinasi efisiensi komputasi dari tujuan global jaringan dengan keserbagunaan mekanisme lokal yang bergantung pada aktivitas.
Jaringan neuron-astrositik
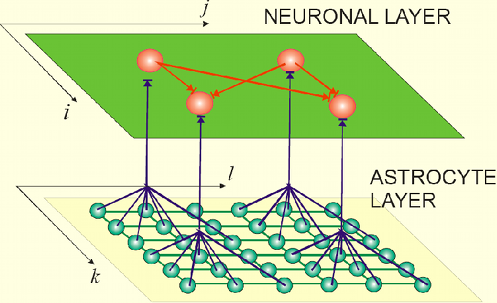
Menyadari celah ini dalam literatur yang ada, para peneliti di Rutgers University sedang mengembangkan algoritma otak yang juga menjelaskan dan mereproduksi fungsi astrosit.
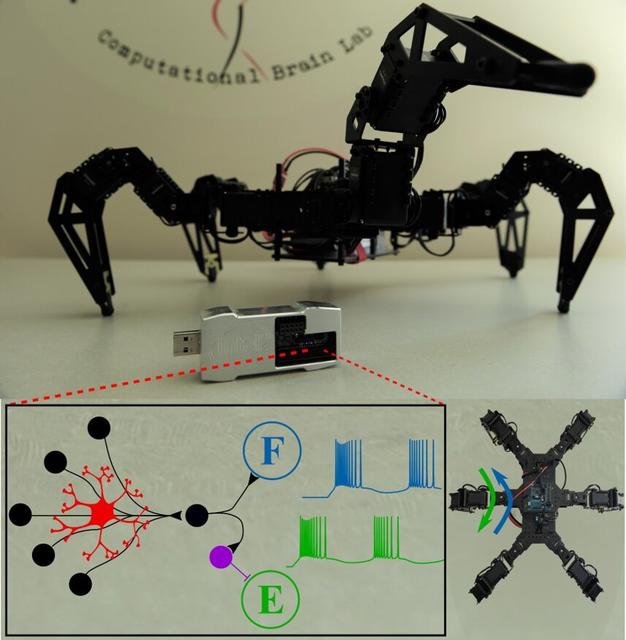
Mereka mengusulkan (hati-hati, tautologi) pengontrol CPG morfik otak berdasarkan jaringan saraf-astrositik komprehensif yang menghasilkan dua pola gaya berjalan untuk robot. Berdasarkan mekanisme neuromodulasi astrositik yang baru diidentifikasi, mereka mengusulkan kepada kami arsitektur CPG yang terintegrasi dengan mulus ke dalam chip neuromorfik Intel Loihi menggunakan lingkungan interaksi waktu nyata antara chip dan lingkungan sistem operasi robotik (ROS).
CPG Loihi dapat digunakan untuk mengontrol robot berjalan dengan ketahanan terhadap kebisingan sensorik dan profil kecepatan variabel.
Sangat menarik untuk mengamati perkembangan pendekatan arsitektural baru di bidang meniru karya otak. Penelitian dan eksperimen sedang dilakukan yang akan sangat mengubah hidup kita di masa depan. Dan pekerjaan kita.