
(Betaflight 4.1, saya belum memotretnya pada pengaturan baru)
Artikel terakhir - Dari Ground ke FPV Quadrocopter: Pendahuluan Suatu
hari, saya memutuskan untuk memutakhirkan ke Betaflight 4.2 dan semua orang di sekitar saya menyarankan untuk mengaktifkan pemfilteran dengan DShot dua arah. Omong-omong, itu di 4.1.
Pertama, mari kita pahami sedikit apa itu penyaringan dan mengapa itu diperlukan.
Secara default, Betaflight menyediakan pengaturan penyaringan umum yang cocok untuk sebagian besar model. Tetapi untuk mencapai kinerja terbaik, pemfilteran dapat disesuaikan secara berbeda, karena mungkin berlebihan atau tidak cukup untuk drone yang babak belur.
MEMS Giroskop
Setiap quadcopter memiliki FC - Flight Controller, yang pada dasarnya adalah otak. Kontroler ini juga memiliki chip digital, yang sering disebut giroskop - giroskop. Ini adalah sensor yang merasakan gerakan. Ini berisi perangkat elektro-mekanis kecil yang disebut MEMS (Micro Electro Mechanical System).
Ada "colokan" beresonansi secara mekanik di dalam perangkat ini. Colokan ini terletak pada ketiga sumbu (pitch, roll, yaw) dan bergerak (bagian mekanis) menciptakan fluktuasi tegangan (bagian listrik).
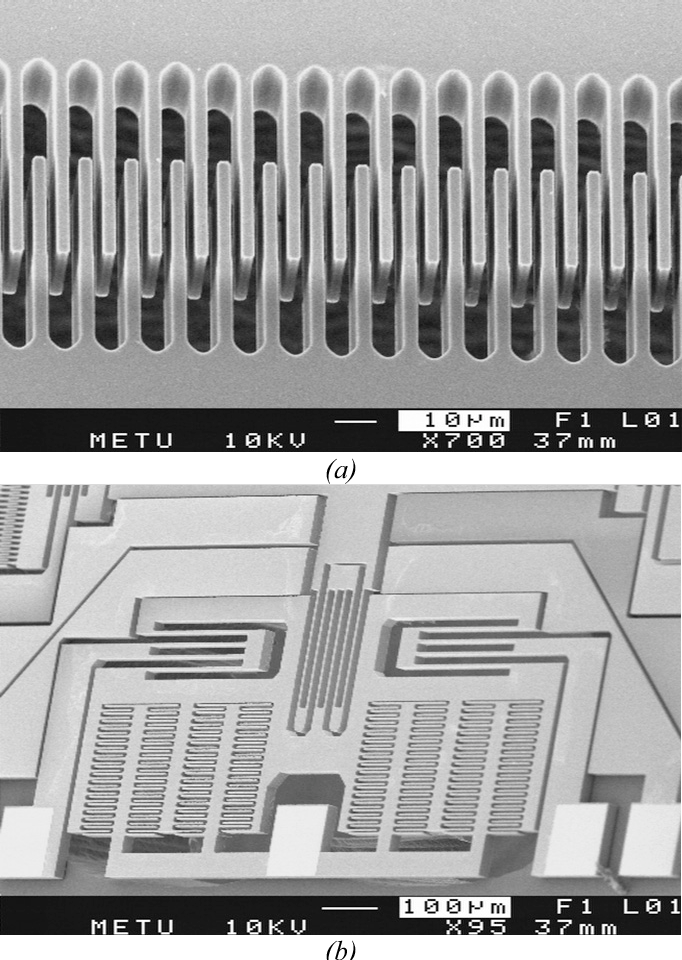
Fluktuasi tegangan (fluktuasi) sebenarnya adalah gelombang analog yang diubah menjadi informasi digital untuk diproses oleh pengendali penerbangan. Ketika kita mengatakan 8k gyro, itu berarti 8000 kali per detik, sinyal analog dikonversi menjadi digital dan diproses oleh controller, firmware, dalam hal ini Betaflight.
Kebisingan
Kebisingan adalah istilah yang sering kita dengar, tapi apa itu? Sebagai aturan, kita segera membayangkan suara bising atau lingkungan yang bising di sarang semut 23 lantai berikutnya.
Giroskop dan pengontrol PID menghadapi masalah serupa. Karena giroskop terletak pada pengontrol penerbangan, yang melekat pada bingkai, ia mengalami kebisingan. Kebisingan dapat berasal dari: motor, baling-baling, kecepatan angin, kebisingan kerangka umum, elektronik, dll.
Kontroler PID
Kontroler PID adalah sistem yang menyesuaikan posisi quadcopter sesuai dengan tongkat (kontrol Anda) atau posisi yang diberikan (baik, apa pun itu). PID disetel oleh 3 parameter - P, I dan D. Sayangnya, dalam artikel ini kami tidak akan mempertimbangkan penyetelan PID secara terperinci. Jika Anda seorang pilot, Anda sudah tahu, dan jika Anda seorang pemula, akan ada artikel terpisah tentang topik ini.
Sistem ini bekerja dengan baik ketika jumlah kebisingan minimal, jika tidak kita mungkin menghadapi masalah seperti osilasi (getaran) atau motor terlalu panas.
Istilah d dalam pengontrol PID terutama terkait dengan noise. D menghaluskan gerakan cepat, tetapi menghitung D pada pengontrol PID secara signifikan meningkatkan noise dalam sinyal. Ini berarti bahwa suara dari giroskop diperkuat secara signifikan oleh nilai suku D dan oleh karena itu kami memfilter di dua tempat - giroskop dan D.
Sebagai contoh peningkatan tersebut, saya akan menunjukkan kepada Anda log berikut:
Grafik pertama - giroskop
Grafik kedua - PID
Ketiga - motor
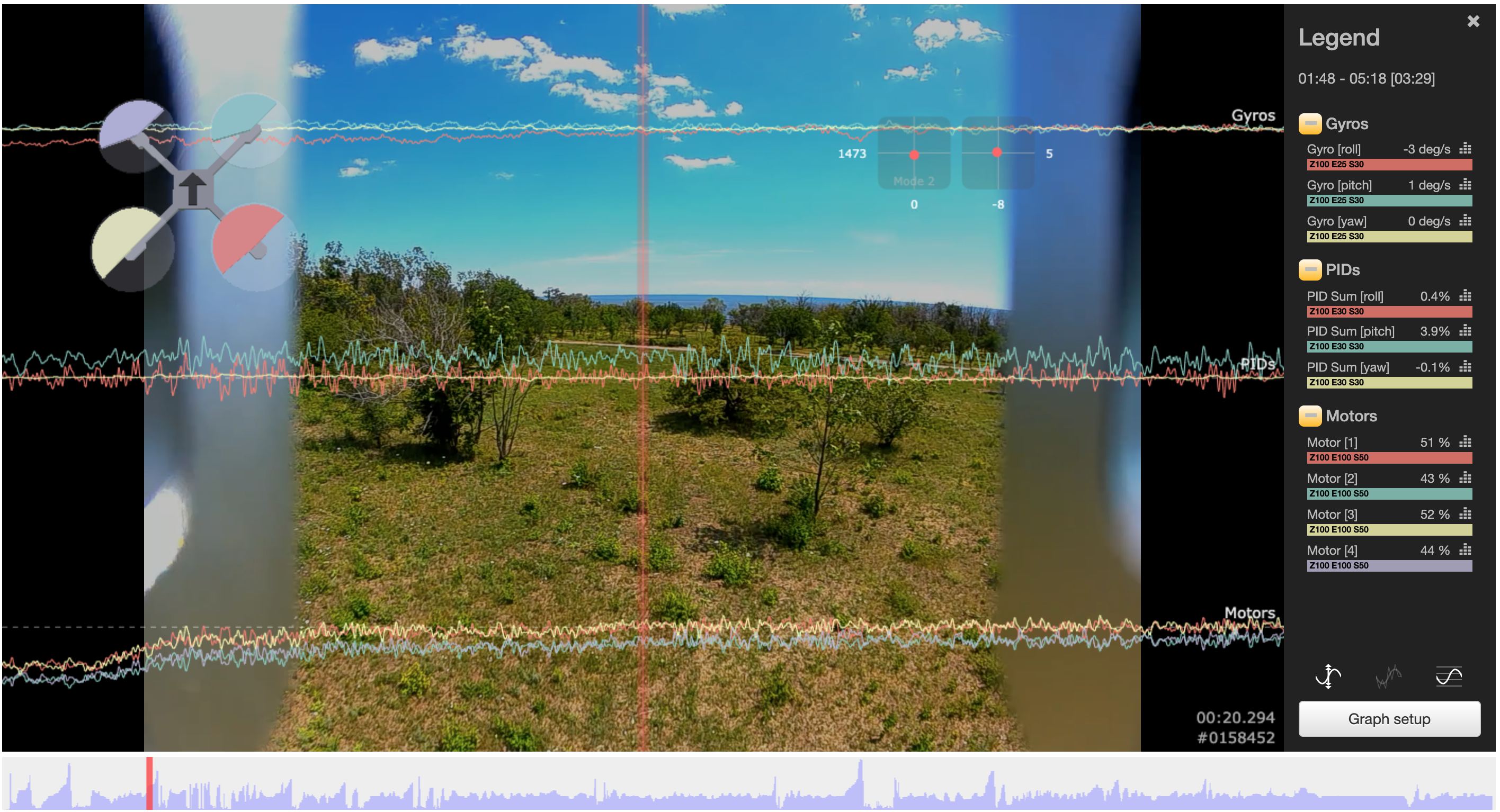
(ini adalah baling-baling normal) , dengan penyaringan yang sedikit berkurang)
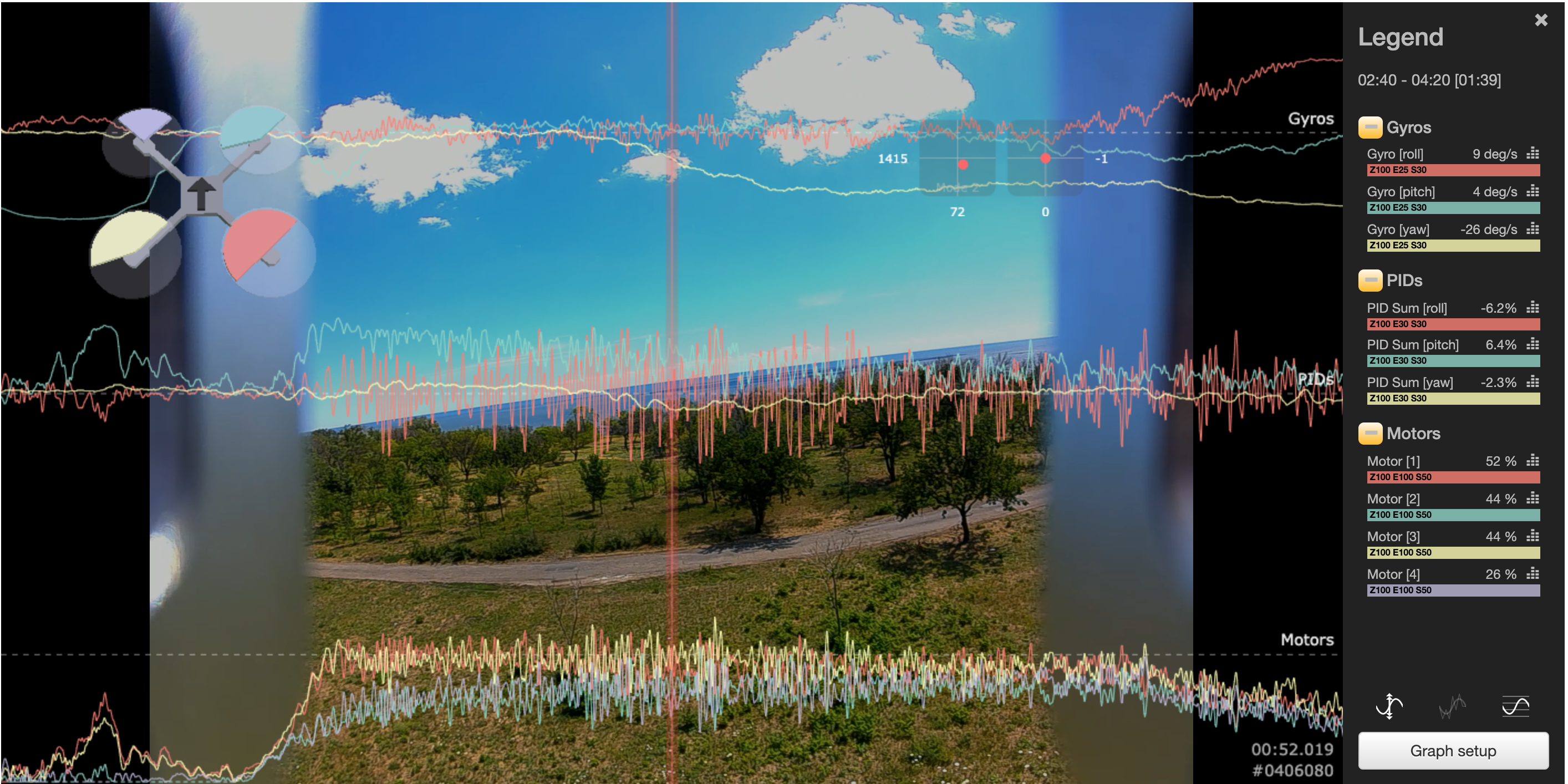
(Seperti yang Anda lihat, getaran dari baling-baling yang buruk diperkuat pada tahap pengontrol PID, yang mengarah pada tekanan yang berlebihan pada motor, mereka benar-benar sosis)
Screenshot dari - Blackbox Explorer .
Penyaringan
Proses penyaringan adalah untuk menghilangkan noise berlebih dari sinyal dari giroskop. Tetapi berapa banyak sinyal dari giroskop yang ingin kita pertahankan, dan berapa banyak untuk disaring?
Jujur, saya tidak bisa memberi tahu Anda dalam warna, tetapi kebetulan dalam penerbangan beta, kebisingan, atau lebih tepatnya getaran, diukur dalam Hz. 1Hz - satu putaran per detik. Ini dilakukan untuk memudahkan visualisasi dan bekerja dengan variabel-variabel ini. Juga, turbulensi secara teknis disebut "laju perubahan rotasi" - frekuensi perubahan rotasi.
Kecepatan quadcopter berada di wilayah 0-30 Hz. Di atas 30Hz hingga 80Hz kami memiliki propwash, ketika quadcopter bergetar dari turbulensi di alirannya sendiri. Informasi dalam kisaran 0 - 80Hz penting untuk pengontrol PID, jadi kami tidak akan menyentuhnya.
Dengan PIDtoolbox Anda dapat menggambar kartu-kartu ini:

Pass Rendah
Filter

Seperti yang ditunjukkan grafik sebelumnya - sinyal dari giroskop berisi informasi dari 0 Hz hingga 1000 Hz, tetapi kami hanya tertarik pada kisaran 0-80 Hz, karena ini adalah gerakan sebenarnya dari quadcopter yang harus diketahui oleh pengontrol PID. Jadi kita memerlukan solusi penyaringan untuk memungkinkan frekuensi rendah untuk melewati pengontrol PID saat menipiskan frekuensi tinggi, dan untuk itu kita dapat menggunakan filter Low Pass.
Filter low-pass memungkinkan sinyal frekuensi rendah untuk melewati dan menipiskan frekuensi tinggi, yang sebagian besar hanya noise.
Frekuensi cutoff diatur, dan pengontrol hanya mengurangi sinyal di atas frekuensi itu. Kurva atenuasimemungkinkan Anda untuk tidak memotong semuanya di bawah yang bersih, dan semakin tinggi frekuensi kebisingan, semakin redaman terjadi, dengan lancar.
Pilot sering membuat kesalahan dengan mengatur filter tersebut pada frekuensi yang sama dengan noise yang terlihat. Misalnya pada 200Hz. Karena filter mengurangi kebisingan dengan mulus, memasang filter seperti itu tidak akan memberikan banyak hasil. Filter harus diatur ke frekuensi yang lebih rendah. Mungkin bahkan pada 80Hz.
Semakin rendah Anda memasang filter seperti itu, semakin banyak pemfilteran.
Ada satu hal sederhana yang perlu diingat ketika menyiapkan pemfilteran. Semakin banyak penyaringan, semakin besar penundaannya. Jelas bahwa dalam milidetik dan tidak signifikan, tetapi untuk kontroler PID sangat penting. Karena itu akan mulai bereaksi terhadap peristiwa nanti, yang berarti akan mencoba untuk menyelaraskan quadcopter di masa lalu :)
Takik filter
Notch diterjemahkan sebagai takik, sebenarnya terlihat seperti ini:
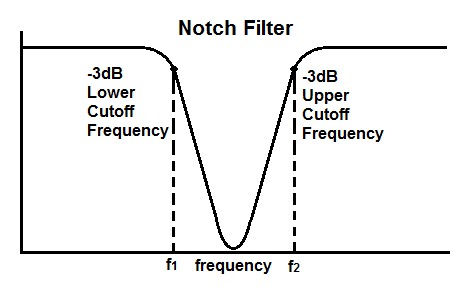
Filter membuang beberapa noise di bawah dan beberapa noise di atas . Sejak Betaflight 3.1, filter ini dinamis dan menyesuaikan dengan tingkat kebisingan yang berbeda.
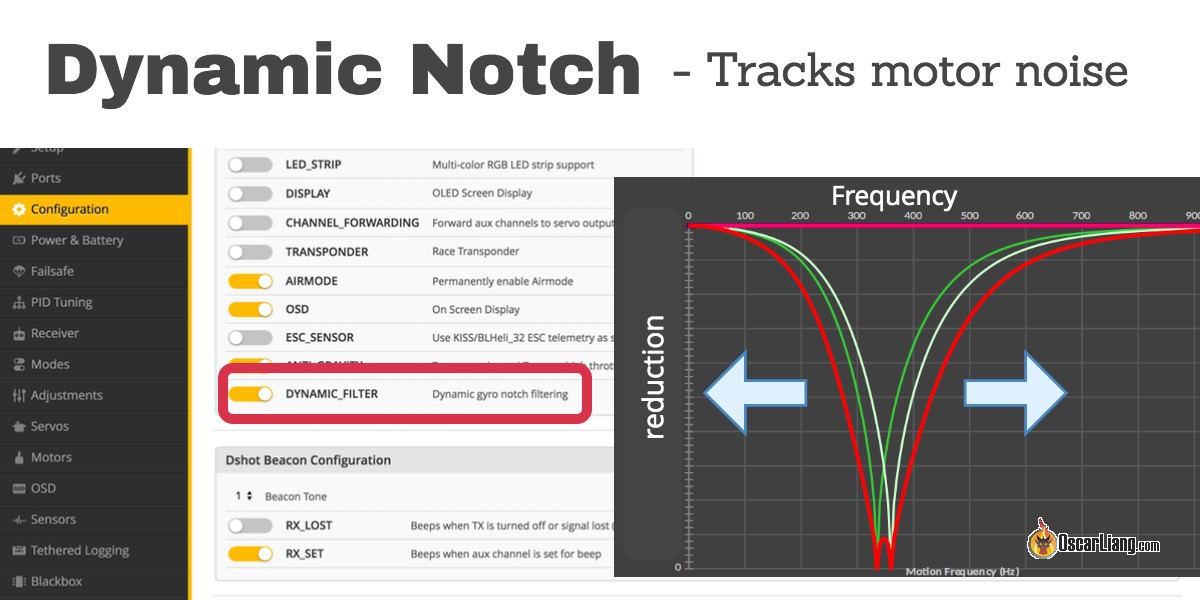
Filter digunakan bersama dengan filter Low Pass, tetapi filter tersebut sudah digunakan untuk menyaring kebisingan dari motor yang terletak di atas.
Penyaringan istilah D
Seperti disebutkan di atas, D mampu melipatgandakan kebisingan dari giroskop, sehingga Betaflight memiliki penyaringan D. Di bawah ini, di fret Anda dapat melihat tingkat kebisingan sebelum dan sesudah penyaringan.
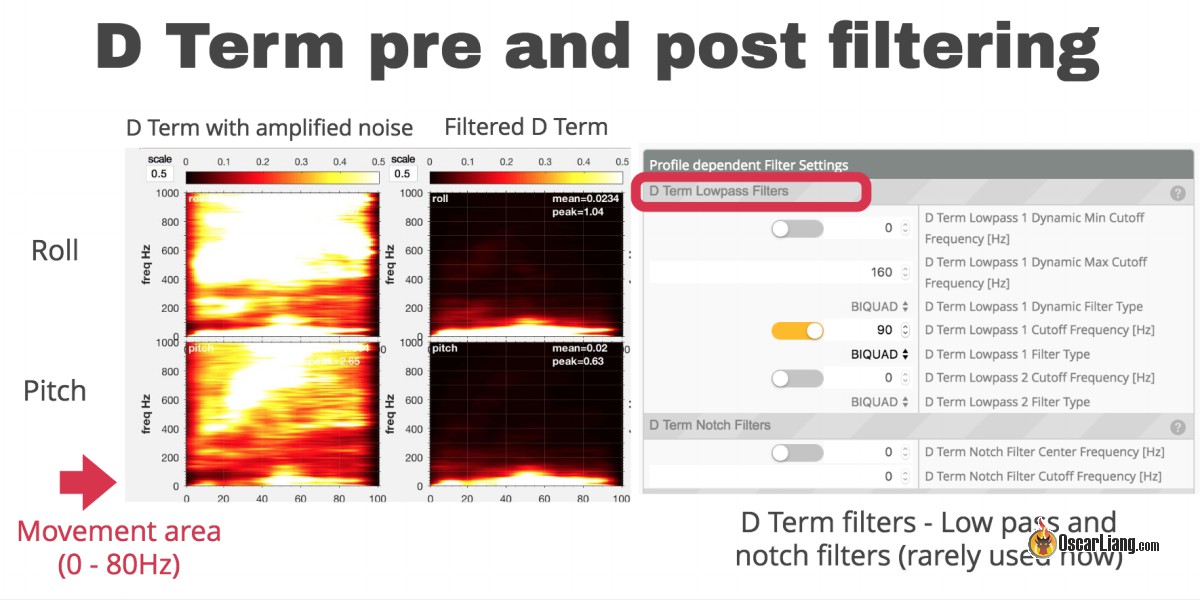
Tidak ada pemahaman yang jelas di komunitas apakah akan memfilter D atau tidak. Tetapi ada aturan motor panas, semakin sedikit filtrasi dan semakin tinggi D, semakin panas dan bahkan mungkin terbakar. Tapi di arah yang berlawanan, kita mendapat penundaan.
Filter RPM
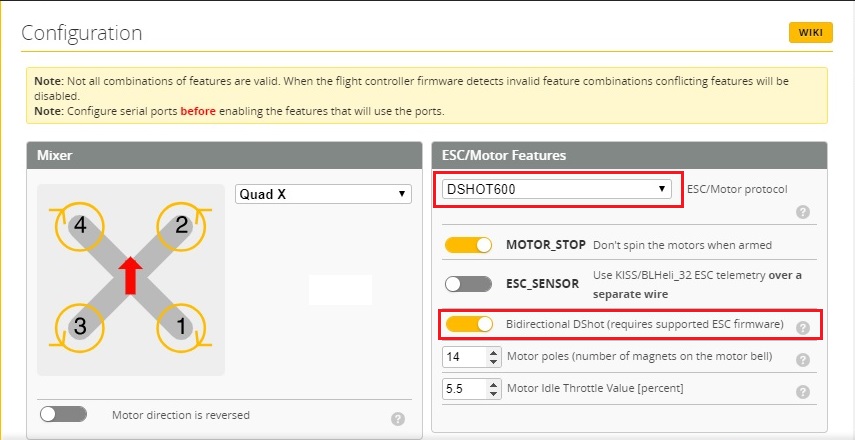
Jadi, sebenarnya, apa yang saya mulai gunakan baru adalah penyaringan RPM. Ia bekerja melalui protokol DSHOT dua arah yang memungkinkan pengendali penerbangan untuk mengetahui RPM yang tepat dari motor tertentu. Dan berdasarkan data ini, penyaringan diterapkan.
(ESC Anda harus mendukung DHSOT dua sisi)
Firmware untuk ESC, mulai 3,7
Jika motornya panas, maka ini merupakan masalah. Motor panas dapat menjadi pertanda bahwa motor mendapatkan banyak kebisingan dan berusaha merespons getaran begitu sering sehingga panas dihasilkan.
Motor dapat menjadi hangat karena sejumlah alasan, seperti kerangka lama, bel yang tertekuk pada motor, keseimbangan yang tidak seimbang, bom tambahan pada drone Anda.
Tentu saja lebih baik memiliki, seperti yang mereka katakan, membangun bersih, dan bahwa semuanya akan menjadi baru, tetapi Anda dapat mencoba mengatur penyaringan terlebih dahulu.
Untuk memulainya, Anda bisa mulai dengan meningkatkan pemfilteran D, dengan mengambil langkah 20 Hz. Periksa suhu setelah setiap langkah tersebut dan temukan rentang optimal Anda.
Dan Anda harus mencarinya di antara suhu motor dan getaran. Seperti disebutkan di atas, meskipun pemfilteran dirancang untuk mengurangi jumlah kebisingan, hal itu dapat menyebabkan beberapa penundaan dan pengontrol PID mungkin tidak mengikutinya. Dan betapa pun lucunya, menyebabkan getaran. Tetapi getaran ini bukan milik propwash. Ini hanya operasi PID yang tidak efisien.
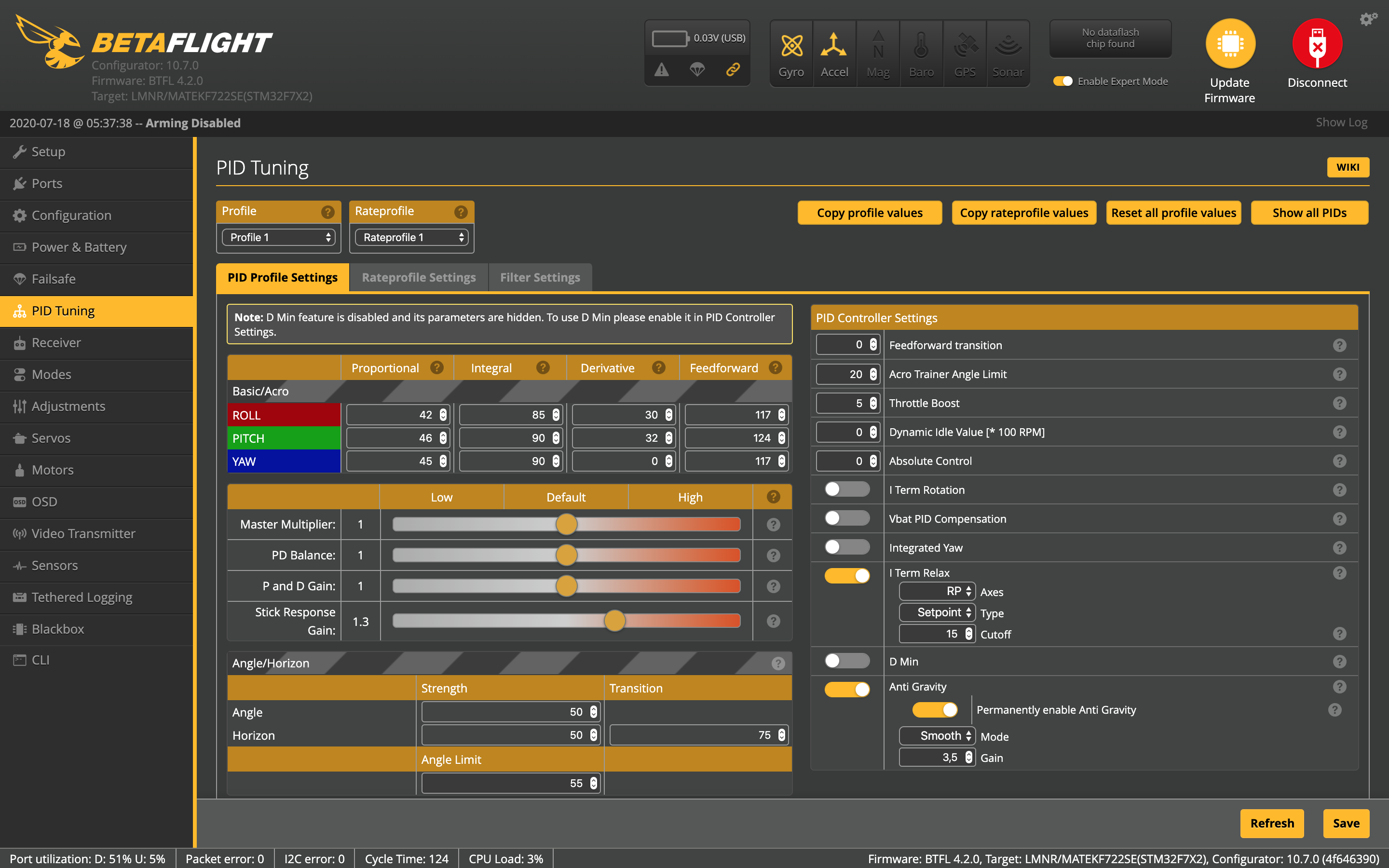
Betaflight versi terbaru memiliki slider, cobalah untuk tidak mengubah nilai filter sendiri, tetapi cobalah menggunakan slider "master" ini.
Saat ini saya memiliki pengaturan seperti itu dengan filter RPM diaktifkan, mungkin saya akan mencoba mengurangi penyaringan lebih banyak lagi:
