Pada peringatan ke-51 pendaratan manusia pertama di bulan pada bulan Juli 1969, mari kita ingat kembali teknologi dasar yang membantu memungkinkan pendaratan ini: filter Kalman . Dinamai Rudolf Kalman, seorang insinyur listrik Amerika, ahli matematika, dan penemu keturunan Hongaria, filter adalah teknik matematika yang ia usulkan pada tahun 1960. Ini sangat berguna untuk memperkirakan posisi objek berdasarkan pengamatan dengan beberapa sensor dan banyak digunakan dalam sistem bimbingan, navigasi dan kontrol untuk kendaraan dan pesawat terbang.
Selama kunjungan Kalman ke Pusat Penelitian Ames NASA di Mountain View, para insinyur NASA melihat bahwa metode Kalman dapat menyelesaikan masalah estimasi lintasan non-linear untuk program Apollo. Namun, menjalankan algoritma filter Kalman pada komputer 1960-an tidak dimungkinkan. Sebuah memo teknis (dari arsip NASA, lihat di bawah) menggambarkan pekerjaan penelitian pada 1960-an dan 1970-an yang menerapkan "filter Kalman yang akurat secara numerik dalam sistem komputasi terbatas memori yang cocok untuk aplikasi waktu nyata seperti , untuk navigasi dalam pesawat atau pesawat ruang angkasa. "
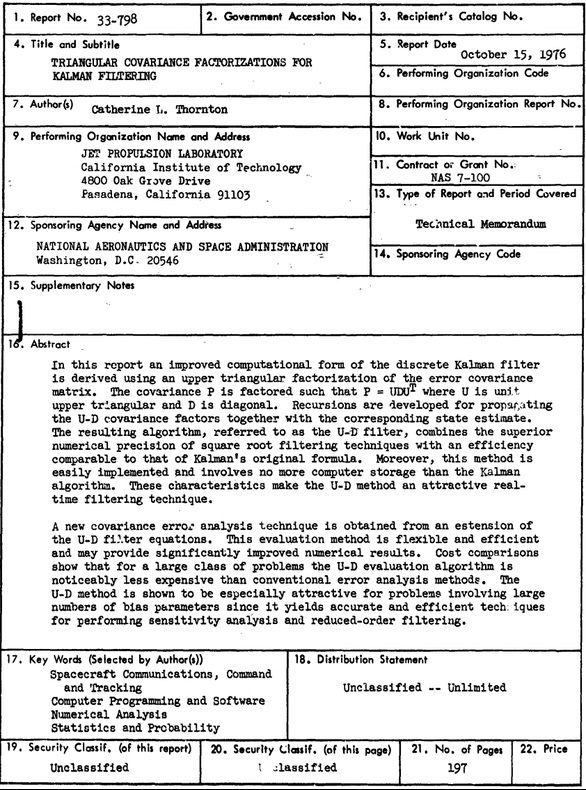
Koefisien kovarian tiga sisi untuk filter Kalman (arsip NASA)
Masalah besar lainnya dengan filter Kalman 50 tahun yang lalu adalah kurangnya stabilitas komputasi karena kesalahan pembulatan yang disebabkan oleh kendala 8-bit. Banyak solusi kompleks telah dikembangkan untuk menyelesaikan masalah ini.
Upaya tim teknik berlanjut dan pada akhirnya, kegigihan membuahkan hasil:
«» 2 , . «» . NASA . , . .
— , «».
Dalam ukuran kecil, prestasi teknik semacam itu membuat misi bulan sukses. Lima puluh tahun kemudian, algoritma penyaringan Kalman digunakan di Bumi di banyak bidang, termasuk robot, drone, dan game VR. Para peneliti di Universitas Tokyo menggunakan filter Kalman pada 2014 untuk membuat Roomba berhasil mendeteksi dan menghindari orang. Federal Reserve AS menggunakan filter Kalman untuk menentukan suku bunga netral jangka panjang dan mengelola kebijakan moneter.
Sebastian Troon, pencipta mobil self-driving di Google, mengajarkan topik menggunakan filter Kalman untuk melacak objek secara real time untuk membuat mobil self-driving. Autoware mengumumkan perilisan satu set bulan inialgoritma open source, termasuk filter Kalman, dan set ini difokuskan pada pengembangan implementasi referensi kendaraan tak berawak di dunia nyata.
Selama beberapa dekade keberadaannya, sejumlah teknologi telah berevolusi bersama dan mencapai tahap perkembangan sedemikian rupa sehingga kombinasi mereka membuat pengemudian yang otonom menjadi mungkin, berguna dan berharga bagi masyarakat. Namun, untuk beralih dari prototyping ke implementasi komersial, perusahaan akan berusaha untuk menstandarisasi dan memastikan interoperabilitas antara komponen - perangkat keras dan algoritma. Interaksi komponen mendorong kompetisi, dan persaingan membantu meningkatkan kualitas dan mengurangi biaya, membawa masa depan tanpa awak lebih dekat dan membenarkan miliaran dolar yang dihabiskan untuk penelitian dan pengembangan di bidang kendaraan tak berawak.
Tautan
:
@TeslaHackers — Tesla-, Tesla
@AutomotiveRu — ,

: