
Lahir untuk merangkak tidak bisa terbang. Ungkapan ini dapat digunakan baik secara metaforis dan harfiah, karena makhluk tanpa sayap (atau bagian fungsional dari tubuh yang memiliki fungsi serupa) benar-benar tidak dapat menaklukkan surga. Setidaknya sebagian besar dari mereka. Aturan tidak akan menjadi aturan jika tidak ada pengecualian. Dalam aspek penerbangan tanpa sayap, ada juga pengecualian ular pohon yang dihiasi ( Chrysopelea) Perwakilan dari jenis ular ini mampu melambung - keterampilan yang sangat berguna mengingat mereka hidup di puncak pohon yang tinggi di atas tanah. Para ilmuwan dari Universitas Politeknik Virginia (AS) memutuskan untuk mempertimbangkan penerbangan layang-layang dari sudut pandang kinematika. Fitur anatomi apa yang memungkinkan ular terbang (jatuh secara terkontrol, tepatnya), apa yang terjadi selama penerbangan dalam hal kinematika, dan bagaimana penelitian ini dapat membantu dalam robotika? Jawaban atas pertanyaan-pertanyaan ini menunggu kita dalam laporan para ilmuwan. Pergilah.
Dasar penelitian
Ular pohon hias adalah genus ular berkelok-kelok yang ditemukan di Asia Selatan dan Tenggara. Perwakilan dari genus ini tidak dapat membanggakan dimensi besar (panjang tubuh hanya 0,6 hingga 1,5 m) dan racun yang mematikan. Meskipun mangsa yang mereka buru di siang hari tidak akan setuju dengan yang terakhir. Mengingat habitatnya (mahkota pohon), ular-ular ini memiliki sangat sedikit musuh, oleh karena itu mereka tidak memiliki kebutuhan khusus untuk racun yang kuat. Selain itu, mereka memiliki taktik yang jauh lebih efektif - mereka tahu cara merencanakan.

Ular terbang, sebagaimana mereka juga disebut oleh orang-orang, merangkak melalui pepohonan, menggunakan sisik kaku di sepanjang perut, memungkinkan mereka untuk bergerak secara vertikal. Jika ular ingin berpindah dari satu pohon ke pohon lain, pertama-tama ular itu merayap ke tepi dahan, lalu melipat tubuhnya ke dalam bentuk huruf Latin "J" untuk membidik (untuk menentukan sudut yang diinginkan "lepas landas" dan lokasi pendaratan). Mengatakan "ayo pergi", ular mendorong tubuhnya ke depan dan ke atas, menarik perutnya dan tulang rusuknya yang menonjol (sehingga tubuhnya menjadi lebih rata dan sedikit cekung). Selama perencanaan, ular terus-menerus membuat gerakan tubuh ular dari sisi ke sisi, yang memungkinkannya mengendalikan penerbangan dan mendarat dengan lembut.
Tampilan samping dari ular terbang Chrysopelea paradisi terbang panjang.
Keuntungan tambahan dari metode pergerakan ular yang tidak biasa ini adalah penghematan energi yang mengesankan, karena penerbangannya jauh lebih cepat (dan lebih aman) daripada perlahan-lahan merangkak dari pohon ke pohon di tanah. Dari uraian singkat ini saja jelas bahwa ada banyak elemen penting dalam mekanisme penerbangan ular; sudut lepas landas, bentuk tubuh selama lepas landas dan penerbangan, gerakan tubuh dalam penerbangan, dll.
Aspek yang paling mencolok, terutama bagi para pengamat, aspek pelarian ular adalah pergerakan tubuh yang bergelombang. Teknik ini digunakan oleh banyak makhluk di planet ini untuk bergerak di darat dan air. Anda tidak perlu pergi jauh, karena ular itu sendiri menggunakannya dengan sempurna. Para ilmuwan mencatat bahwa gerakan bergelombang di darat dan air telah dipelajari dengan cukup baik, tetapi pirouette semacam itu di udara masih merupakan misteri.
Pada ular Chrysopelea , undulasi dicirikan oleh bentuk tubuh berbentuk S, frekuensi undulasi rendah (1-2 Hz) dan penampang aerodinamis yang rata dari tubuh.
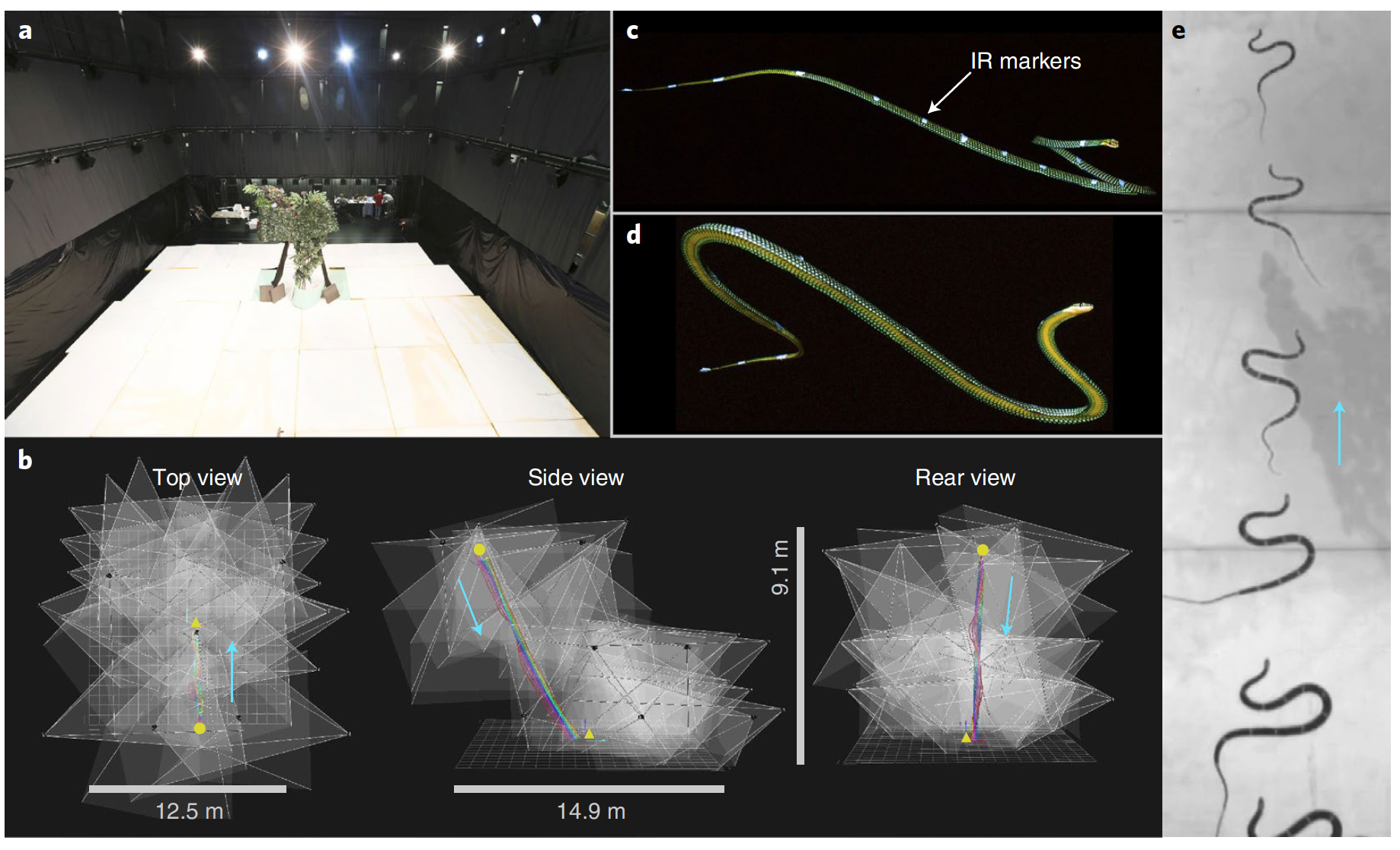
Image No. 1
Faktanya, gelombang udara terus-menerus membangun kembali tubuh ular, mengubahnya menjadi bentuk sayap ( 1). Penelitian sebelumnya menunjukkan bahwa layang-layang terbang selalu melakukan gerakan bergelombang dalam penerbangan. Namun, masih belum jelas apakah kegelisahan adalah bagian penting dari penerbangan yang sukses atau hanya kebiasaan. aspek perilaku pergerakan di darat, bermigrasi ke penerbangan tanpa maksud apa pun.
Jika kita memperhitungkan keresahan di darat dan air, maka kita dapat berasumsi bahwa itu menghasilkan daya dorong di udara. Pada media padat, gerakan bergelombang terjadi karena gaya kontak terdistribusi pada daerah ventral dan lateral tubuh, dan dalam air, perpindahan atau penyerapan cairan di sepanjang tubuh menyebabkan gerakan ke depan. Dalam kedua kasus tersebut, gaya penggerak utama bertindak dominan di bidang kegelisahan. Modulasi tubuh di luar bidang (dalam arah vertikal) dapat digunakan untuk tujuan sekunder, seperti mengurangi resistensi atau meningkatkan gaya normal.
Tetapi untuk layang-layang terbang, perencanaan yang sukses membutuhkan generasi kekuatan aerodinamika yang diperlukan untuk mengimbangi berat hewan. Gaya angkat dan hambatan diciptakan oleh udara yang mengalir melalui tubuh yang rata ketika dipercepat ke bawah oleh gravitasi, dan gerakan bolak-balik yang disebabkan oleh kontraksi otot mungkin tidak meningkatkan pembentukan kekuatan.
Tampak depan lepas landas dan perataan ular terbang Chrysopelea paradisi.
Kekuatan aerodinamis yang dihasilkan harus bertindak di luar bidang kegalauan, dan kegelisahan itu sendiri harus terus-menerus mengubah distribusi kekuatan pada tubuh ular. Layak juga mempertimbangkan bahwa layang-layang terbang dapat "khawatir" tidak hanya secara horizontal, tetapi juga secara vertikal. Ini berarti bahwa model penerbangan layang-layang mengandung elemen pitch * dan roll * .
Pitch * - gerakan sudut relatif terhadap sumbu inersia horizontal transversal.Dalam studi ini, para ilmuwan memutuskan untuk memeriksa secara rinci peran undulasi dalam penerbangan ular. Dengan menggunakan rekaman penerbangan ular berkecepatan tinggi, para ilmuwan dapat mengukur kegelisahan di udara. Data yang diperoleh memungkinkan untuk membuat model tiga dimensi penerbangan layang-layang yang akurat.
Roll * - gerakan sudut tentang sumbu longitudinal.
Hasil penelitian
Undulasi udara terdiri dari sekelompok gelombang lentur horizontal dan vertikal. 11-17 spidol ditempatkan di sepanjang tubuh ular (7 individu) yang berpartisipasi dalam penembakan penerbangan (area pendaratan tinggi 8,3 meter). Evaluasi perubahan posisi penanda ini memungkinkan Anda untuk secara akurat menentukan struktur kegelisahan selama penerbangan.
Tampilan teratas uji meluncur dari Chrysopelea paradisi ular terbang.
Penanda inframerah diperoleh saat meluncur ular terbang, Chrysopelea paradisi.
Setelah 36 pengamatan praktis, para ilmuwan menciptakan model 3D tubuh ular ( r ).
Pengembangan model 3D dari ular terbang Chrysopelea paradisi berdasarkan data penangkapan gerak.
Dengan menggunakan vektor tangen (t̂ = ∂r / ∂s), dimungkinkan untuk menguraikan gelombang menjadi dua gelombang lentur sudut yang bergerak di sepanjang tubuh.
Gelombang horizontal dan vertikal diberikan oleh rumus berikut:
θ̅ (s, t) = -tan -1 t̂ x / t̂ y
dan
ψ̅ (s, t) = sin -1 t̂ z di
mana θ̅ (s, t) dan ψ̅ (s, t ) Apakah sudut lokal yang membentuk tubuh relatif terhadap arah horisontal dan vertikal, sebagai fungsi dari panjang busur dan waktu t.
Data menunjukkan bahwa layang-layang terbang menggunakan dua gelombang: gelombang horizontal dengan amplitudo besar dan gelombang vertikal dengan amplitudo lebih rendah, yang keduanya berjalan berurutan di tubuh mulai dari kepala hingga ekor (gambar # 2).

Gambar # 2
Gelombang ini terbentuk setelah transien awal ketika ular melompat dalam postur yang relatif lurus dan kemudian membentuk postur berbentuk S yang khas untuk meluncur.
Ada empat fitur gelombang udara yang mengaitkan gelombang vertikal dengan gelombang horisontal ( 2a ). Pertama, gelombang vertikal memiliki frekuensi spasial dan temporal dua kali lipat dari gelombang horizontal. Ini menunjukkan bahwa tubuh memiliki dua kali lebih banyak tikungan vertikal daripada tikungan lateral ( 2a ,2f ). Kedua, tikungan-U pada badan layang-layang terbang dapat diidentifikasi sebagai zero crossing pada plot sudut tikungan ( 2b ). Ketiga, crossover ini adalah tinggi gelombang vertikal, yang menunjukkan bahwa gelombang horizontal dan vertikal 90 ° dari fase. Keempat, lentur out-of-plane maksimum terjadi pada U-bends dan sekitar pertengahan di sepanjang segmen lurus. Di U-bends, penampang "sayap" ular dilipat karena gerakan tubuh di luar pesawat ( 1c , 1d ).
Bentuk gelombang perjalanan berubah seiring waktu ketika layang-layang berakselerasi dan menghasilkan gaya aerodinamis, tetapi beberapa fitur masih umum. Gelombang horizontal adalah sinusoid dengan puncak datar, amplitudo (80-120 °) tergantung pada jumlah periode spasial, dan jumlah periode yang lebih kecil mengarah ke sudut lengkung horizontal yang lebih tinggi. Gelombang vertikal adalah sinusoid puncak-sempit dengan lembah lebar dengan amplitudo berkisar antara 20 ° hingga 45 °.
Kuantifikasi karakteristik spasial dan temporal dari gelombang menunjukkan bahwa layang-layang menggunakan gelombang horizontal dengan 1-1,5 periode spasial dan frekuensi gelombang 1-1,7 Hz dan gelombang vertikal dengan 2-3 periode spasial dan frekuensi gelombang 2-3,4 Hz.
Ada komponen tambahan dalam undulasi udara, yang oleh para ilmuwan disebut "tikungan dorso-ventral," yang mewakili gerakan naik dan turun dari bagian belakang tubuh relatif ke kepala. Sudut kemiringan tikungan ini berkisar antara -20 ° hingga 30 °. Tikungan dorsoventral selalu hadir dalam penerbangan yang diamati, tetapi tidak memiliki hubungan yang signifikan dengan jumlah periode spasial.
Untuk secara akurat menentukan tingkat pengaruh hubungan gelombang horizontal dan vertikal, serta efek tikungan dorsoventral pada dinamika penerbangan, para ilmuwan telah menciptakan model ular yang terbang secara anatomis yang akurat secara anatomis. Kontrol atas model ini memungkinkan, menurut para ilmuwan, untuk secara sistematis memeriksa bagaimana komponen kegelisahan (amplitudo gelombang horizontal, jumlah periode spasial dan frekuensi kegembiraan) mempengaruhi dinamika perencanaan jangka pendek dan jangka panjang.
Gelombang horizontal dimodelkan sebagai sinusoid dengan puncak datar dari amplitudo besar, dan gelombang vertikal dimodelkan sebagai sinusoid dengan amplitudo kecil: di
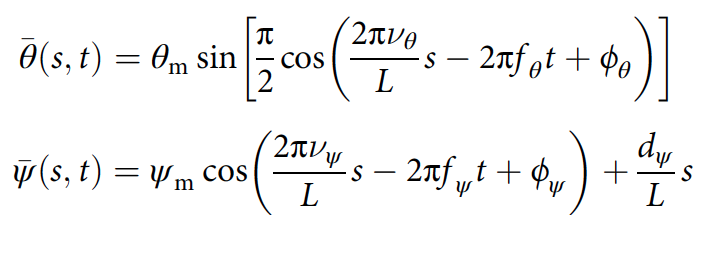
mana θ m dan ψ m adalah sudut lentur horizontal dan vertikal maksimum; ν adalah jumlah periode spasial; f adalah frekuensi undulasi; ϕ - pergeseran fasa; d ψ adalah sudut lentur dorsoventral; L adalah panjang tubuh ( 2f , 2g ).
Gelombang horizontal dan vertikal terhubung dalam data kinematik ( 2e ): ν ψ = 2ν θ , f ψ = 2f θ dan ϕ ψ = 2 (ϕ θ- π / 2). Ini sangat menyederhanakan model untuk 5 variabel yang menentukan bentuk tubuh: θ m , ψ m , ν θ , f θ dan d ψ .
Posisi r = [x, y, z] tubuh relatif terhadap pusat massa dihitung sebagai berikut: x s x = cosψ̅sinθ̅, ∂ s y = -cosψ̅cosθ̅ dan ∂ s z = sinψ̅.
Posisi pusat massa R 0 dan orientasi tubuh (sudut yaw * , pitch dan roll) ditentukan dengan mengintegrasikan persamaan gerak translasi dan rotasi.
Yaw * - gerakan sudut tentang sumbu vertikal.
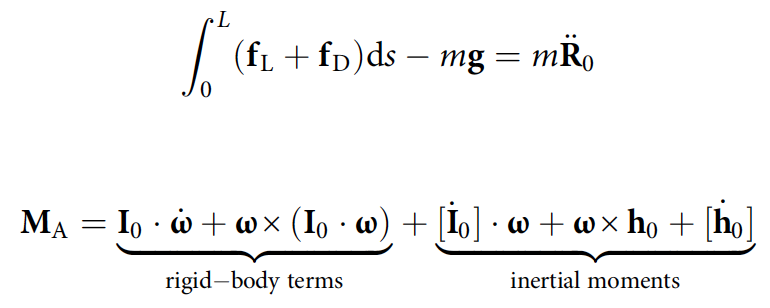
di mana f L dan f D - gaya angkat dan resistensi yang sangat kecil; M A - momen aerodinamis; m adalah massa ular.
Untuk mengkonfirmasi bahwa model matematika menghasilkan hasil yang realistis secara fisik, para ilmuwan mensimulasikan penerbangan menggunakan parameter yang diperoleh dari pengamatan layang nyata layang-layang nyata (perbandingan simulasi dan pengamatan ditunjukkan pada gambar di bawah).

Gambar No. 3
Dilihat dari perbandingan, model ini bekerja, tetapi memiliki beberapa ketidakakuratan kecil yang perlu ditangani di masa depan.
Untuk memeriksa pengaruh kegelisahan pada karakteristik perencanaan, dua simulasi dilakukan: dengan f θ = 0 Hz (tanpa kegelisahan) dan f θ= 1,2 Hz (frekuensi waviness rata-rata pada ular). Dalam kedua versi, ν θ dan θ m bervariasi ( 4a ).

Gambar No. 4
Data kinematik dari bentuk tubuh ular dalam model memungkinkan untuk mendapatkan bentuk 121 dengan 1 ≤ ν θ ≤ 1,5 gelombang tubuh dan amplitudo gelombang horizontal dalam kisaran 90 ° ≤ θ m ≤ 119 °. Selanjutnya, bentuk tubuh yang diamati diekstraksi dari array ini (bagian tengah grafik, dipisahkan sepanjang diagonal; 4b ). Bagian dari grafik yang disorot di bawah ini berisi bentuk tubuh "terbuka" (menyerupai huruf S), dan bagian atas - "tertutup" (menyerupai tanda infinity).
Amplitudo gelombang vertikal dan sudut dorsoventral dipertahankan pada tingkat yang konstan: masing-masing 20 ° dan 10 °. Simulasi dianggap selesai ketika pusat massa tubuh ular menyentuh tanah (pendaratan) atau ketika salah satu sudut orientasi melebihi nilai ambang 85 °. Jika ini terjadi, maka perencanaan dianggap tidak stabil, mis. tidak suka di alam. Selama simulasi, dinamika jangka pendek (ketinggian mulai 10 m) dan dinamika jangka panjang (ketinggian mulai 75 m) dengan / tanpa undulasi diuji.
Model ini menunjukkan bahwa riak memiliki efek positif pada kinerja meluncur, biasanya meningkatkan jarak horizontal dan vertikal yang ditempuh sebelum layang-layang yang disimulasikan menjadi tidak stabil.
Simulasi ular terbang meluncur dengan dan tanpa bergelombang.
Glides pendek dengan ketinggian peluncuran 10 m menunjukkan koefisien stabilitas yang baik di hadapan gelombang (94%). Jika undulasi tidak dimasukkan dalam model, maka hanya 50% penerbangan yang stabil. Waviness juga meningkatkan jarak meluncur (dari 4 m menjadi 4,3 m).
Ketika merencanakan pemodelan dari ketinggian 75 m, gelombang naik baik jarak horizontal maupun vertikal sebelum ketidakstabilan terwujud dalam 86% peluncuran. Dalam hal ini, keresahan juga meningkatkan jarak penerbangan di 92% dari peluncuran. Goncangan juga meningkatkan jarak horizontal rata-rata sebesar 6,9 m.
Untuk mengetahui pengaruh amplitudo gelombang vertikal dan tikungan dorsoventral pada dinamika geser, kami menggunakan nilai yang berbeda dari parameter ini dalam simulasi dan mempertimbangkan hasilnya.
Gambar # 5
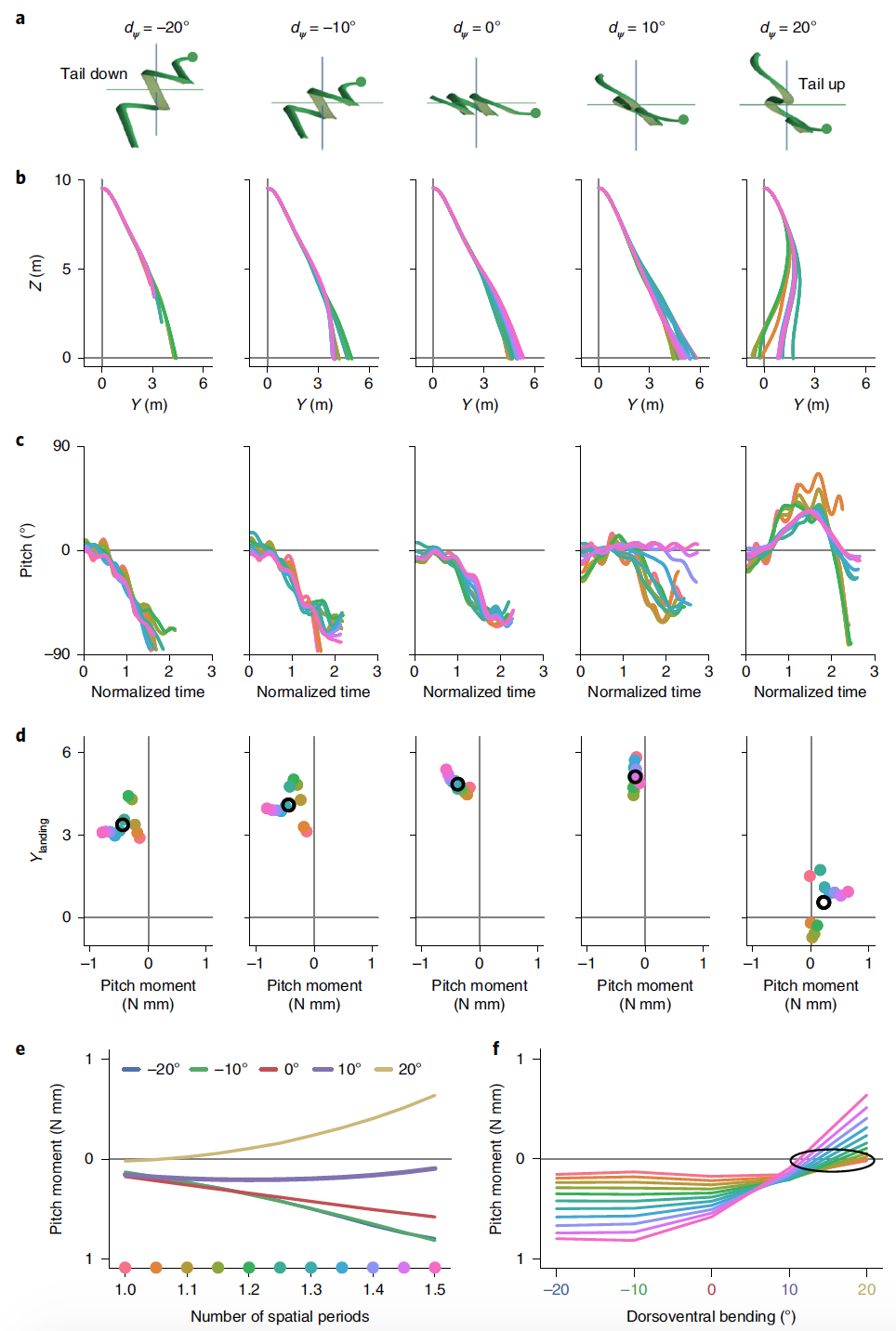
Perencanaan disimulasikan dengan ψ m = 0 °, 10 ° dan 20 ° dan tikungan dorsoventral dari -20 ° hingga 20 ° dalam 10 ° langkah ( 5a ) untuk 11 bentuk tubuh yang berbeda.
Getaran vertikal memiliki efek yang relatif kecil pada jalur perencanaan, sementara lentur dorsoventral memiliki efek yang signifikan.
Seekor ular datar sempurna (ψ m= 0 °), yang tidak pernah diamati selama tes eksperimental, menunjukkan hasil terburuk yang diharapkan. Peningkatan amplitudo gelombang vertikal meningkatkan efisiensi perencanaan karena memutar dari penampang di bidang, yang memberikan sudut yang lebih menguntungkan untuk menciptakan gaya ( 2j ).
Berbeda dengan amplitudo gelombang vertikal, tikungan dorsoventral memiliki efek nyata pada karakteristik meluncur, terutama pada pitch.
Pada ψ m = −20 ° dengan bagian belakang tubuh di bawah kepala, perencanaan tidak dangkal, melainkan menjadi tinggi tidak stabil sebelum jatuh 10 m. Pada ψ m= 20 ° dengan bagian belakang tubuh di atas kepala, lintasan melengkung ke belakang, sementara beberapa bentuk tubuh mendarat di belakang lompatan. Perencanaan yang buruk seperti itu dibenarkan dengan memiringkan tubuh. Namun demikian, perencanaan dengan parameter di atas memiliki stabilitas rotasi yang baik.
Untuk memverifikasi hubungan antara karakteristik bend, pitching dan perencanaan tubuh dorsoventral, simulasi dilakukan tanpa rotasi. Alih-alih memecahkan sistem persamaan nonlinier berganda # 4 dan # 5, para ilmuwan mengambil sampel gaya aerodinamik pada fase tubuh yang berbeda selama siklus undulasi. Selanjutnya, persamaan # 4 diintegrasikan di sini, dan posisi dan kecepatan pusat massa dihitung.
Faktanya, manipulasi ini merupakan eksperimen dari “terowongan angin virtual”, di mana model dinamis digunakan untuk menghitung gaya terdistribusi yang bekerja pada tubuh selama akselerasi. Metode ini menghilangkan hubungan antara gerak translasi dan rotasi untuk mengkuantifikasi kontribusi aerodinamis dan inersia individu terhadap gerakan rotasi.
Ketika tikungan dorsoventral meningkat dari -20 ° hingga 10 °, posisi tempat duduk ular yang disimulasikan meningkat ketika nada rata-rata meningkat ke arah nol ( 5d ). Dengan tikungan dorsoventral 20 °, momen pitch rata-rata fase menjadi positif, dan karakteristik perencanaan berkurang.
Untuk setiap sudut tikungan dorsoventral, efisiensi perencanaan dan momen miring rata-rata juga tergantung pada bentuk yang digunakan, khususnya pada jumlah periode spasial dan amplitudo gelombang horizontal. Untuk bentuk tubuh apa pun pada saat perencanaan, tikungan dorsoventral memiliki pengaruh besar pada momen rata-rata pitch, dan ketika jumlah periode spasial meningkat, momen menyimpang, menjadi lebih positif atau negatif tergantung pada d ψ .
Tanda-tanda fase rata-rata momen pitch pada 5e sesuai dengan kemiringan ke atas atau kemiringan yang ditunjukkan pada 5c dan karakteristik perencanaan yang dihasilkan pada 5b . Di 5fDitunjukkan bahwa untuk bentuk tubuh dengan periode spasial terkecil, momen pitch rata-rata akan menjadi yang terkecil.
Dari data yang diuraikan di atas, dapat diasumsikan bahwa gelombang vertikal menyebabkan tubuh meluncur keluar dari pesawat, mengubah orientasi lokal "sayap rata" (bentuk tubuh ular selama meluncur) dengan bantuan aliran udara. Tikungan dorsoventral mengontrol besarnya dan tanda momentum aerodinamik yang memengaruhi tubuh. Layang-layang terbang dapat mengontrol momen pitching dengan mengubah sudut tikungan dorsoventral atau bentuk gelombang horizontal selama penerbangan.
Akibatnya, tikungan dorsoventral dari tubuh memainkan peran yang sangat penting dalam meluncur stabilitas, pendaratan yang sukses dan kemampuan untuk mengubah lintasan luncur yang tepat selama pelaksanaannya.

Gambar No. 6
Analisis fase dengan rata-rata memungkinkan seseorang untuk mengukur kontribusi relatif dari momen aerodinamika dan inersia terhadap dinamika meluncur.
Persamaan # 5 menyiratkan bahwa orientasi tubuh dipengaruhi oleh gaya aerodinamik dan perubahan distribusi massa. Kontribusi aerodinamik ( 6a ) meningkat dengan waktu seiring meningkatnya kecepatan, sedangkan kontribusi inersia ( 6b ) tetap konstan. Kedua momen bersifat berkala, dan hanya momen pitch yang menunjukkan rata-rata fase nol.
Awalnya, momen inersia mendominasi di dekat sumbu pitch and roll, tetapi selama satu siklus seperti gelombang kontribusinya menurun dengan cepat. Momen inersia yaw, sebagai suatu peraturan, adalah urutan besarnya lebih besar dari momen yaw aerodinamik dan lebih besar dari momen inersia di sekitar sumbu lainnya. Momen inersia yaw terjadi karena gelombang horizontal dengan amplitudo besar dan tubuh berbentuk S yang lebar. Hasil ini menunjukkan bahwa layang-layang terbang dapat menggunakan rotasi inersia sebagai mekanisme manuver.
Untuk seorang kenalan yang lebih mendetail dengan nuansa penelitian ini, saya sarankan Anda melihat laporan para ilmuwan dan bahan tambahan untuk itu.
Dan mereka yang ingin membiasakan diri dengan perangkat lunak yang digunakan untuk menganalisis perencanaan layang-layang terbang dapat mengikuti tautan ini .
Epilog
Dalam studi ini, para peneliti menggunakan penangkapan gerak dan teknik pemodelan 3D terbaru untuk membuat model ular terbang yang secara anatomis akurat.
Memahami dinamika penerbangan burung pernah juga sulit, tetapi itu tidak membingungkan para ilmuwan seperti halnya layang-layang terbang. Di alam, tidak banyak contoh penerbangan tanpa sayap, dan semuanya terkait dengan penggunaan mekanisme non-standar yang memungkinkan hewan untuk merencanakan, dan tidak jatuh ke tanah dengan batu.
Dalam kasus ular terbang, gelombang yang diamati dalam pergerakan ular melata dan mengambang memainkan peran yang sangat penting. Mekanisme tambahan untuk menstabilkan perencanaan adalah koreksi sudut dorsoventral dari tikungan tubuh. Dengan menggabungkan elemen-elemen ini bersama-sama, layang-layang terbang dapat terbang dari pohon ke pohon, tahu persis tempat penanaman di masa depan.
Para penulis karya ini percaya bahwa data mereka tidak hanya memungkinkan kami untuk lebih memahami kebiasaan ular pohon hias, tetapi juga untuk mendapatkan inspirasi tambahan untuk membuat robot seperti ular. Ya, sudah ada robot seperti itu. Mereka merangkak, dapat menavigasi permukaan yang sulit dan mencapai tempat yang sulit dijangkau, tetapi bisakah mereka terbang?
Dengan pertimbangan seperti itu, dunia kita akan segera menjadi seperti kota mobil dari Matrix, tempat makhluk robot yang sangat tidak biasa (dan sedikit menakutkan) merangkak di sepanjang dinding, yang tujuannya sulit untuk dipahami. Keinginan seseorang untuk membuat versi robot segala sesuatu yang mengelilinginya tidak bisa ditipu. Ini adalah sifat kita - untuk memahami segalanya, untuk mengetahui segalanya, untuk dapat menciptakan apa yang alam lakukan dengan indah di hadapan kita. Jika ular robot, laba-laba, anjing, dan hewan robot lainnya akan jauh lebih baik daripada membahayakan - studi seperti itu sepenuhnya dibenarkan.
Terima kasih atas perhatian Anda, tetap ingin tahu dan bersenang-senang akhir pekan, kawan!
Jumat off-top:
, .
, .
Off-top 2.0:
, :)
, :)
Sedikit iklan
Terima kasih untuk tetap bersama kami. Apakah Anda suka artikel kami? Ingin melihat konten yang lebih menarik? Dukung kami dengan melakukan pemesanan atau merekomendasikan kepada teman-teman, cloud VPS untuk pengembang mulai $ 4,99 , analog unik dari server entry-level yang kami buat untuk Anda: Seluruh Kebenaran Tentang VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps mulai dari $ 19 atau cara membagi server dengan benar? (opsi tersedia dengan RAID1 dan RAID10, hingga 24 core dan hingga 40GB DDR4).
Dell R730xd 2x lebih murah di pusat data Equinix Tier IV di Amsterdam? Hanya kami yang memiliki 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV dari $ 199 di Belanda!Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - mulai dari $ 99! Baca tentang Cara Membangun Infrastruktur Bldg. kelas dengan penggunaan server Dell R730xd E5-2650 v4 seharga € 9000 untuk satu sen?