Sejak 2017, saya telah melakukan visi komputer yang berbeda: dari deteksi dan klasifikasi yang jelas hingga membaca gerak bibir .
Dan setelah serangkaian kecelakaan, saya menemukan diri saya satu-satunya insinyur Computer Vision di sebuah perusahaan rintisan yang membuat helikopter tak berawak. Untuk alasan ini, saya memutuskan untuk menerobos dengan kaki penglihatan komputer saya dan melakukan beberapa proyek hewan peliharaan yang terkait dengan drone.
Rencananya adalah sebagai berikut: Saya hanya akan merakit quadric dengan kamera, autopilot dan beberapa bagian tepi besi (neuron penggerak dan CV lainnya), dan saya akan mendapatkan plus atau minus platform terbang universal. Misalnya seperti ini , tapi lebih fleksibel dan lebih murah. Dan ada banyak aplikasi menarik: dari mendeteksi seseorang dan mengikutinya, hingga mengontrol quadrocopter menggunakan Reinforcement Learning .
Beginilah perjalanan saya selama 8 bulan dimulai: dari ide dan memesan komponen pertama di aliexpress hingga penggunaan penuh odometri visual onboard oleh quadcopter dan terbang di sepanjang itu.
Di bagian pertama artikel (setelah beberapa paragraf!) Saya akan memberi tahu dan menunjukkan komponen apa yang saya gunakan untuk merakit quadrocopter untuk tugas ini, apa yang saya pandu saat memilih dan apa yang harus dipertimbangkan untuk membuatnya terbang.
( !) , , GPS, visual SLAM.
,
450 ( 450).

. : . - . , tradeoff \.
,

-, . , , ¯\_(ツ)_/¯
( AliExpress) . 700KV (← ; , KV ). KV.
,
( ), , , , ( ).
: , , 10 . 10, , , , .
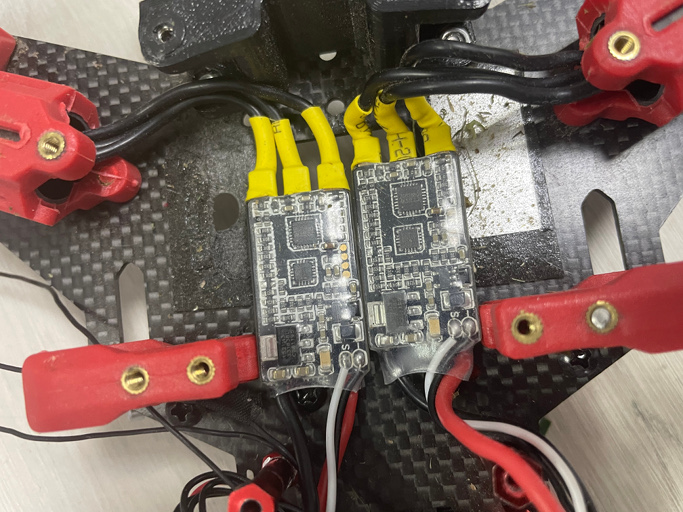
ESC. DShotXXX ( XXX, )
, software , ESC ( ArduPilot PX4, )
,
( — XXYY): ( ). . ? . .

, , : - .
, . 1145.
, . , , . - , - :)
( ): 1) ( ) 2) .
,

( "") .
: . , , . 4S Li-Po , 5000 mAh. . , ( ) 20 .
,

(\) . .. . , . ( ) FrSky (Taranis X10 lite FrSky R-XSR). , , \.
"" RadioMaster. , FrSky , .
,
software stack (state estimation, , ), hardware ( software stack ).
Hardware , ( IMU, , ).

( + GPS, , ), , .
- . .. - . open-source , ( ): ArduPilot PX4.
ardupilot ( , ) 2020- hardware - pixhawk 4 mini.
, companion computer

, . companion computer , , - path planning, external navigation, + task specific .
: Intel Movidius, Google Coral, Jetson . Raspberry c .. , "" .
Jetson-e Nano ( ) (TensorRT), GPU .. - CUDA ( CUDA, , ?), SLAM .
,
Intel RealSense D435, , RGB . Raspberry Pi c MIPI .. 3D , - , .
, , , rolling shutter .. , .
, !
, (, ) !
, , :
Getting Started. . , .
, companion computer . , .
, , . , , ( , ESC).
, .
, ( ⇒ ).
Loctite ( ), ( , ). - .
( ), , .
( GPS), .
. : , . LiPo 4.2v. , "" , ( 3.5-3.6v)
, ?
, : .
- . (), .
Hasilnya adalah drone yang sangat membosankan untuk diterbangkan dalam mode manual, dan jika memang terbang, maka hanya di jalan, itu besar untuk penggunaan di dalam ruangan. Tetapi DimDrone akan berfungsi sebagai platform yang sangat baik untuk menguji dan meneliti berbagai algoritme visi komputer.