Pada artikel ini saya akan mencoba menguraikan esensi dari proyek saya dan menunjukkan proses yang mengalir dari sketsa robot anjing menjadi memesan papan sirkuit tercetak untuk sarung tangan.
Mulailah
Sarung tangan ini langsung dari proyek Mark saya dan juga merupakan bagian penting darinya, jadi Anda harus memulainya.
Prototipe pertama robot dibuat pada suatu malam di musim panas 2018. Itu adalah robot berkaki empat yang terdiri dari 8 servos SG90 (biru biasa) dan potongan paku. Semua ini terhubung dengan lem panas meleleh dan tidak memiliki kesempatan tunggal untuk operasi normal karena distribusi massa yang sangat buruk. Tetapi saya tidak tahu ini, dan malam itu saya memaksanya untuk berjalan dalam garis lurus, dan 15 menit setelah itu, papan yang melaluinya listrik mulai berasap dan penstabil linier tersegel muncul di atas meja (omong-omong, saya tidak mengerti apa yang terjadi di sana) ...
Saya tidak bisa memperbaiki tumpukan paku lem panas dan selotip listrik. Dalam pembelaan saya, saya dapat mengatakan bahwa pada saat itu saya tidak tahu cara menyolder, dari elektronik saya hanya mengerti bahwa tidak mungkin untuk menutup + dan -, tetapi saya belum mendengar tentang adanya pencetakan 3D.
Pada akhir musim panas saya memesan printer pertama saya - Anet A8.
Printer biasa untuk membiasakan diri dengan teknologi: bingkai akrilik, kinematika dengan "drywall" dan motor berisik (bukan drivernya)
Hampir segera setelah membelinya, saya menguasai tinkercad, di mana saya membuat ulang robot itu dengan 4 kaki, sudah dengan mengganti paku dengan plastik dan menambahkan servo putar.
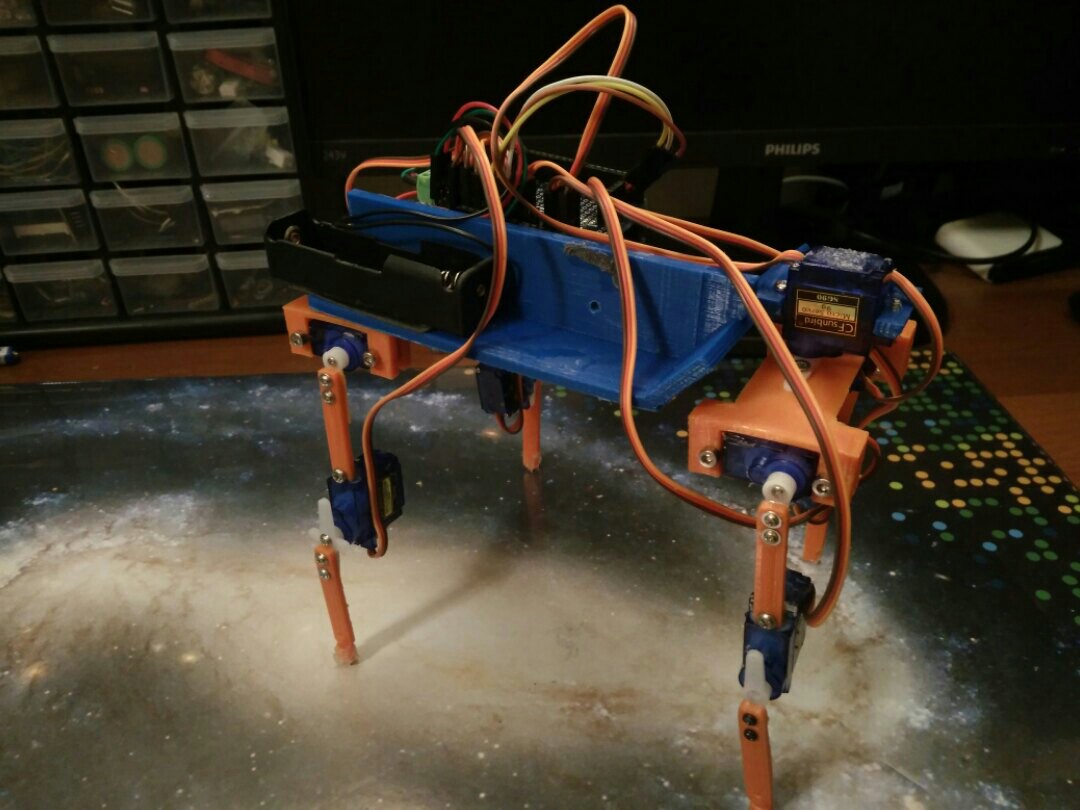
Kreasi ini tidak pernah datang, tetapi mendorong saya untuk membuat versi lain. Mungkin saya akan membuat artikel terpisah untuk robot berkaki cacing saya, jadi saya hanya akan memberi Anda urutan foto versinya.
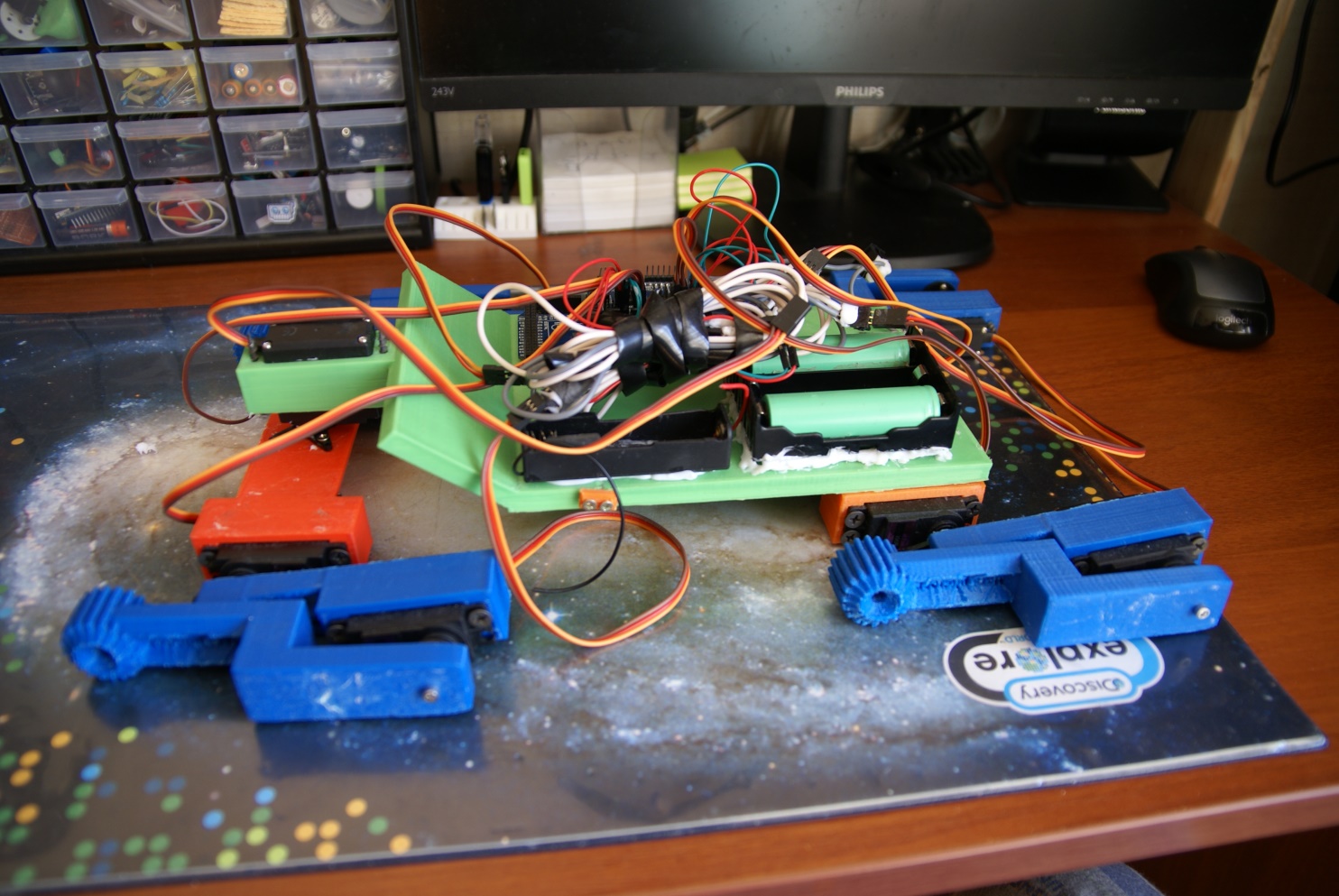

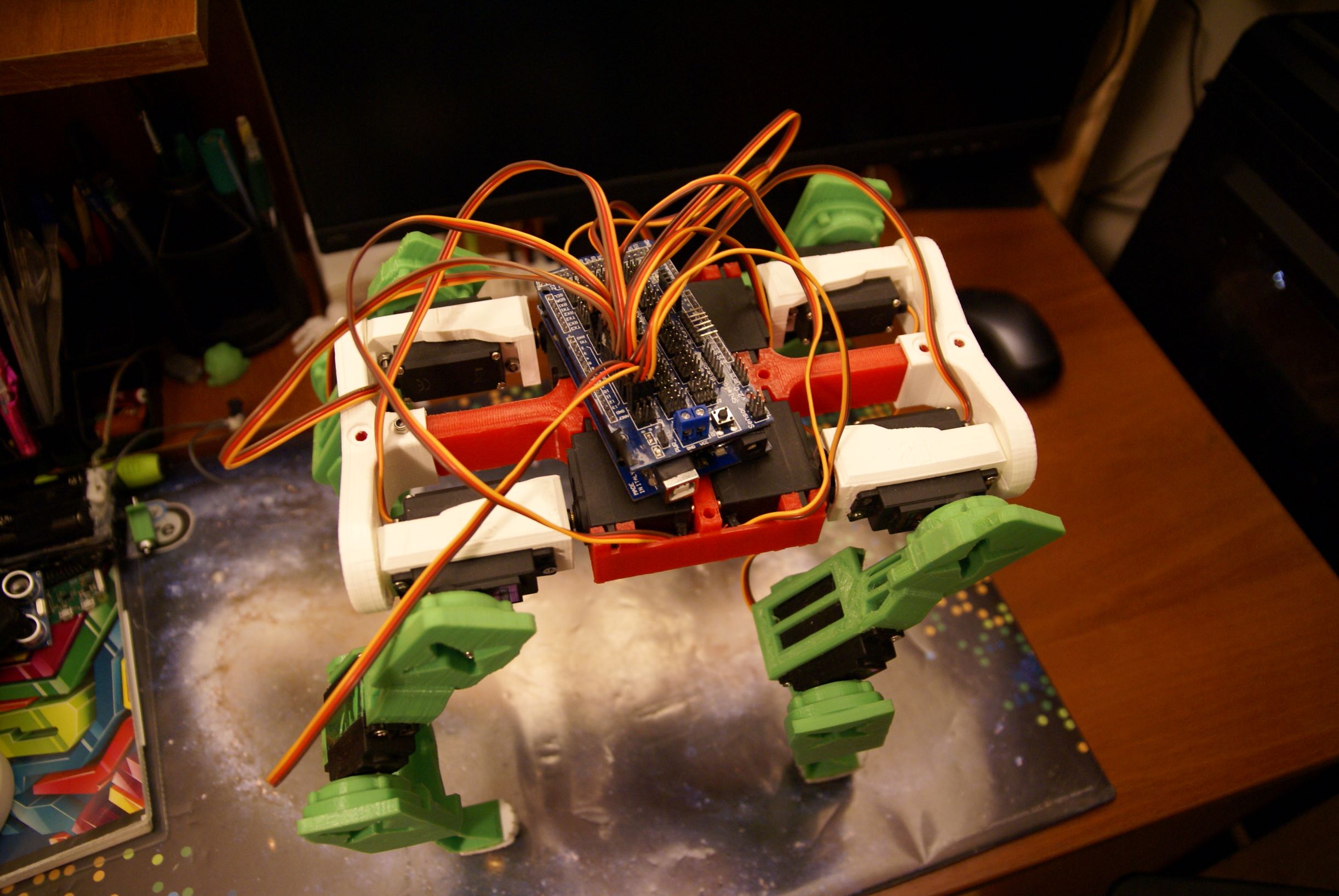
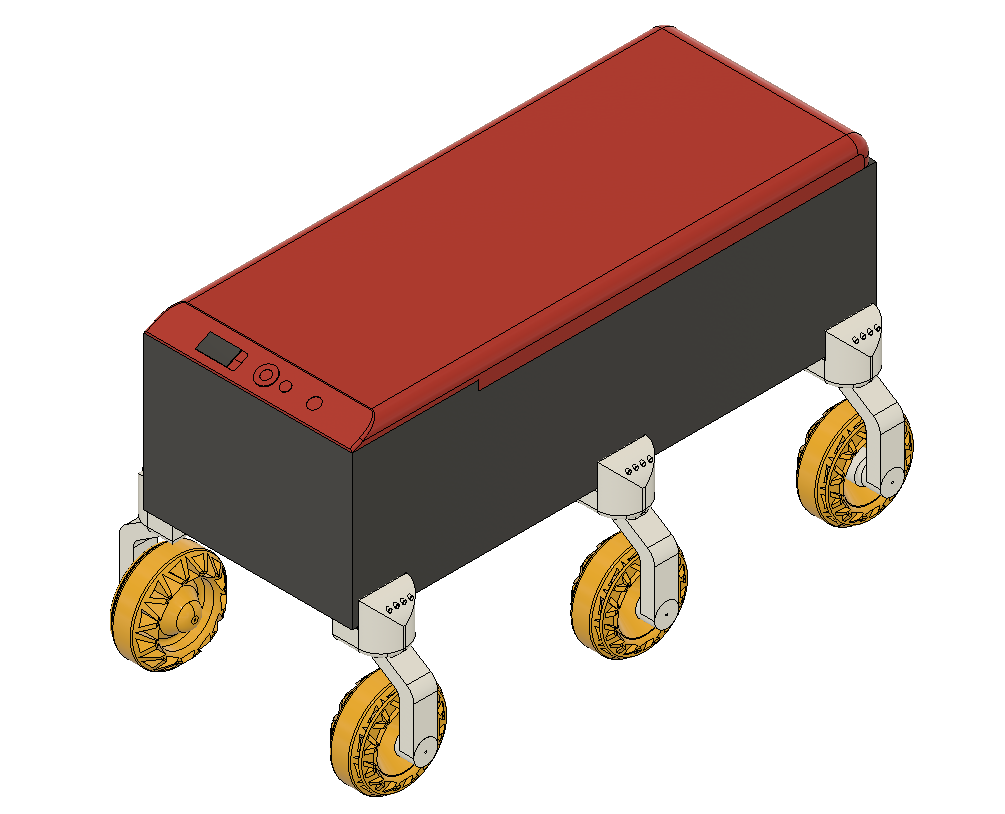
Versi terbaru sekarang memperoleh bodi, tetapi berjalan normal dan memiliki daya dukung yang baik.
2 Mark. , . - , .
:
Mark - , - .
Mark 6 - , .
Mark 3 - , , 4 .
Mark 4 - , .
Mark 5 - 6 . .
Mark 7 - , Mark 5 .
Mark gauntlet – .
Mark 6, Mark 4, Mark 3 Mark gauntlet.
Mark 6 ,
: 1
2020 , : 433 . ( , ) https://youtu.be/eEAHhr9Suug?t=194

: 2
2 , .

nrf24l01, . https://youtu.be/P_fq7KkfJrI
Rukami. 2-3 , .
: 3 4
.
3 :
:
WiFi esp8266
NRF24l01+
433
Bluetooth
+
OLED
, - . https://youtu.be/52WvejA6dyk .
4 :
Atmega2560
:
:
WiFi
NRF24L01+
LoRa
MP3
- ( )
+
+
OLED
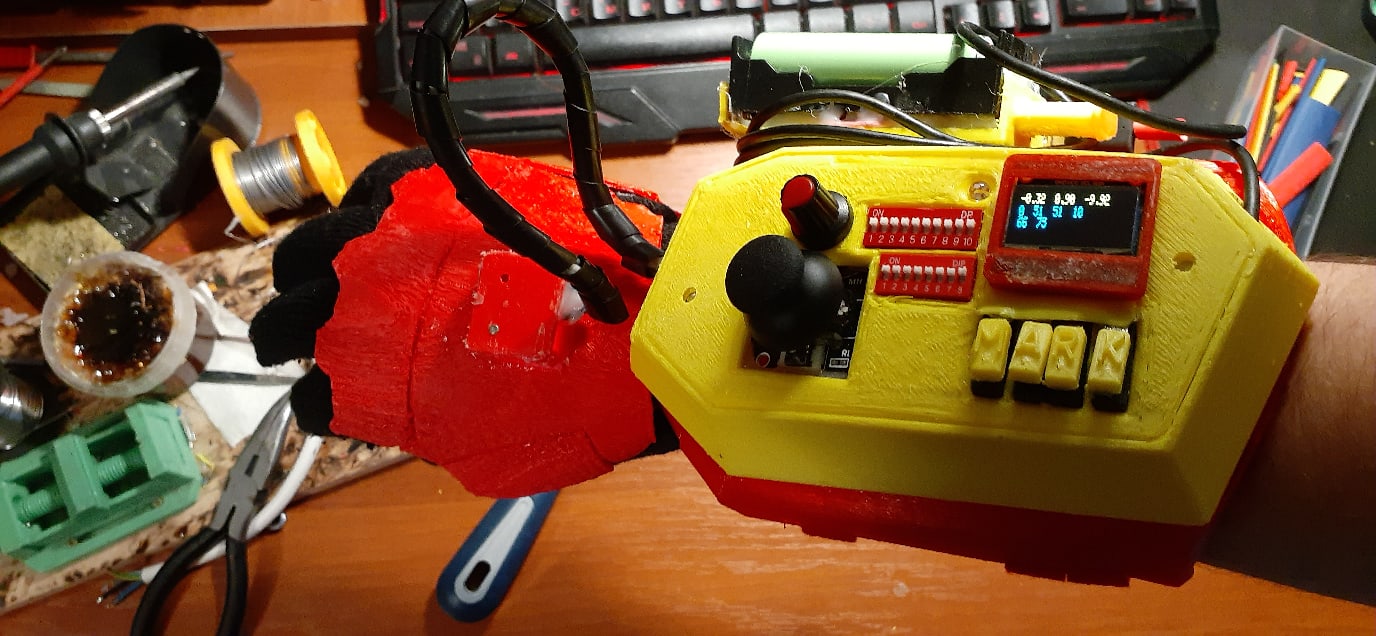
, 4.2
4.2
, ,
-
4
3 18650 3.4 * , . .
2 ,

, . LoRa . : https://github.com/Madjogger1202/Mark_GauntletV4.2/blob/main/src/main.cpp
.
/*
Hi stranger, this is main code file for this project
I'm not a 100% programmer, but i can make electronics work,
so i will be grateful if you add any features
it is fully opensource project, so anyone can build stuff based on this code
have a great time reading this badly written working code (^_^)
*/
#include <Arduino.h> // why not...
#include <Wire.h>
#include <SPI.h>
// i have to make all modules work, so i will use some libraris to make life easier
//1) Display. im using 0.96 oled from china, it is not standart at dimentions, bt i like how it looks in final designs :)
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h> // Adafruit librari works 50/50, it depends on display driver (yes, they can hava same names, bt diffrent drivers)
//2) RGB Led panel. LEDs 2812 (8-bit panel)
#include <microLED.h>
//3) NRF24L01+
#include <nRF24L01.h>
#include <RF24.h>
//4)APDC9960 usefull sensor
#include "Adafruit_APDS9960.h"
//5) LoRa radio sx1278
#include <RH_RF95.h>
//6) MPU6050 gyro + acsel
#include <Adafruit_Sensor.h>
#include <Adafruit_MPU6050.h>
//7) MP3 module
#include <DFPlayer_Mini_Mp3.h>
// first switches connection
int8_t first_sw[8] = { A14, A13, A12, A11, A10, A9, A8, A7 };
// second switches connection
int8_t second_sw[8] = { 38, 37, 36, 35, 34, A6, 32, A15 };
// buttons connection
int8_t buttons[4] = { A3, A1, A0, A2 };
#define LED1 10
#define LED2 11
#define JOY_X A6
#define JOY_Y A5
#define POT A4
#define LORA_D0 42
#define LORA_NSS 43
#define LORA_RST 44
#define NRF_CSN 40
#define NRF_CE 41
#define IR_LED 7
#define R_LED 4
#define G_LED 5
#define B_LED 6
#define WS_LED 45
LEDdata leds[8];
microLED strip(leds, 8, WS_LED);
#define ORDER_GRB
RF24 radio(NRF_CE, NRF_CSN);
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display(128, 32, &Wire, -1);
Adafruit_APDS9960 apds;
volatile bool irqMPU;
volatile bool irqAPDC;
struct allData
{
volatile boolean irqMPU;
volatile boolean irqAPDC;
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
uint8_t led1Mode;
uint8_t led2Mode;
uint8_t redLedMode;
uint8_t blueLedMode;
uint8_t greenLedMode;
uint8_t wsLedMode;
}mainData;
struct radioData
{
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
} telemetriData;
void readMode();
void readCh();
void readAcs();
void readJoy();
void readPot();
void readButtons();
void sendNRF();
void sendBL();
void sendLoRa(); // will reliase it soon
void displayInfo();
// at all it is possible to create up to 256 diffrent modes,
// but if you need more - connect mode counter with channel counter (maybe partly)
void n1Mode();
void n2Mode();
void n3Mode();
void n4Mode();
void n5Mode();
void n6Mode();
void n7Mode();
void n8Mode();
void n9Mode();
void n10Mode();
void n11Mode();
void n12Mode();
void acsel()
{
mainData.irqMPU=true;
}
void gesture()
{
mainData.irqAPDC=true;
}
void setup()
{
for(int i=0;i<8;i++)
pinMode(first_sw[i], INPUT_PULLUP);
for(int i=0;i<8;i++)
pinMode(second_sw[i], INPUT_PULLUP);
for(int i=0;i<4;i++)
pinMode(buttons[i], INPUT_PULLUP);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
analogWrite(LED1, 10);
analogWrite(LED2, 100);
pinMode(JOY_X, INPUT);
pinMode(JOY_Y, INPUT);
pinMode(POT, INPUT_PULLUP);
pinMode(LORA_D0, OUTPUT);
pinMode(LORA_NSS, OUTPUT);
pinMode(LORA_RST, OUTPUT);
pinMode(NRF_CSN, OUTPUT);
pinMode(NRF_CE, OUTPUT);
pinMode(IR_LED, OUTPUT);
pinMode(R_LED, OUTPUT);
pinMode(G_LED, OUTPUT);
pinMode(B_LED, OUTPUT);
pinMode(WS_LED, OUTPUT);
strip.setBrightness(130);
strip.clear();
strip.show();
strip.fill(mCOLOR(YELLOW));
strip.show();
Serial.begin(115200);
Serial2.begin(9600);
mp3_set_serial(Serial2);
mp3_set_volume(30);
mp3_play (1);
if (!mpu.begin())
Serial.println("Sensor init failed");
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
display.display();
display.clearDisplay();
display.display();
if(!apds.begin())
Serial.println("failed to initialize device! Please check your wiring.");
apds.enableProximity(true);
apds.enableGesture(true);
radio.begin();
radio.setChannel(100);
radio.setDataRate (RF24_1MBPS);
radio.setPALevel (RF24_PA_HIGH);
radio.openWritingPipe (0x1234567899LL);
radio.setAutoAck(false);
attachInterrupt(0, acsel, RISING);
attachInterrupt(1, gesture, RISING);
Serial1.begin(9600); // bluetooth module connected to Serial1
delay(5000);
mp3_stop ();
}
void loop()
{
readMode();
readCh();
readAcs();
readJoy();
readPot();
readButtons();
Serial.println(digitalRead(A14));
Serial.println(digitalRead(A13));
Serial.println(digitalRead(A12));
Serial.println(digitalRead(A11));
Serial.println(digitalRead(A10));
Serial.println(digitalRead(A9));
Serial.println(digitalRead(A8));
Serial.println(digitalRead(A7));
Serial.println();
Serial.println();
displayInfo();
switch (mainData.mode)
{
case 0:
n1Mode();
break;
case 2:
n2Mode();
break;
case 3:
n3Mode();
break;
case 4:
n4Mode();
break;
}
}
void readAcs() // reading acseleration values from sensor directly to main struct
{
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
mainData.x_acs = a.acceleration.x;
mainData.y_acs = a.acceleration.y;
mainData.z_acs = a.acceleration.z;
return;
}
void readJoy() // i am filering analog values for better perfomance
{
mainData.joyX = (analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X))/4;
mainData.joyY = (analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y))/4;
return;
}
void readPot()
{
mainData.potData = analogRead(POT);
return;
}
void readButtons() // buttons : 1) 1; 2)0; 3)1; 4)1; and mainData.button == 1011
{
mainData.button = !digitalRead(A1)*1000+!digitalRead(A2)*100+!digitalRead(A3)*10+!digitalRead(A0);
return;
}
void sendNRF()
{
// i am writing telemetri struct only when sending data
// in this case i can track how relevant telemetri data is
telemetriData.stable = mainData.stable;
telemetriData.x_acs = mainData.x_acs;
telemetriData.y_acs = mainData.y_acs;
telemetriData.z_acs = mainData.z_acs;
telemetriData.mode = mainData.mode;
telemetriData.channel = mainData.channel;
telemetriData.button = mainData.button;
telemetriData.potData = mainData.potData;
telemetriData.joyX = mainData.joyX;
telemetriData.joyY = mainData.joyY;
radio.write(&telemetriData, sizeof(telemetriData));
}
void sendBL(String inp)
{
Serial1.print(inp);
return;
}
// void sendLoRa();
void displayInfo()
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.print(mainData.channel);
display.print(" ");
display.print(mainData.mode);
display.print(" ");
display.println(mainData.z_acs);
display.print(mainData.button);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.println(mainData.potData);
display.display();
}
void readMode()
{
bitWrite(mainData.mode, 0, (!digitalRead(A14)));
bitWrite(mainData.mode, 1, (!digitalRead(A13)));
bitWrite(mainData.mode, 2, (!digitalRead(A12)));
bitWrite(mainData.mode, 3, (!digitalRead(A11)));
bitWrite(mainData.mode, 4, (!digitalRead(A10)));
bitWrite(mainData.mode, 5, (!digitalRead(A9)));
bitWrite(mainData.mode, 6, (!digitalRead(A8)));
bitWrite(mainData.mode, 7, (!digitalRead(A7)));
return;
}
void readCh()
{
bitWrite(mainData.channel, 0, digitalRead(second_sw[0]));
bitWrite(mainData.channel, 1, digitalRead(second_sw[1]));
bitWrite(mainData.channel, 2, digitalRead(second_sw[2]));
bitWrite(mainData.channel, 3, digitalRead(second_sw[3]));
bitWrite(mainData.channel, 4, digitalRead(second_sw[4]));
bitWrite(mainData.channel, 5, digitalRead(second_sw[5]));
bitWrite(mainData.channel, 6, digitalRead(second_sw[6]));
bitWrite(mainData.channel, 7, digitalRead(second_sw[7]));
return;
}
void n1Mode()
{
sendNRF();
digitalWrite(LED1, !digitalRead(LED1)); // just blink to understand, that it is working
}
void n2Mode()
{
}
void n3Mode()
{
}
void n4Mode()
{
}
void n5Mode()
{
}
void n6Mode()
{
}
void n7Mode()
{
}
void n8Mode()
{
}
void n9Mode()
{
}
void n10Mode()
{
}
void n11Mode()
{
}
void n12Mode()
{
}