Lebih dari setahun yang lalu, saya beruntung menjadi bagian dari tim ilmuwan dan insinyur yang bertanggung jawab atas pengoperasian penjelajah Curiosity. Sejak itu, saya telah belajar BANYAK tentang penjelajah. Tapi masih banyak yang harus dilihat. Semangat, Peluang, Keingintahuan, dan Ketekunan adalah beberapa robot paling canggih namun andal yang pernah dibuat oleh manusia. Pada saat yang sama, alat dan metode yang digunakan untuk mengontrol penjelajah cukup mudah dipelajari dan dimengerti. Dan ini bagus, karena pada 18 Februari, Perservance akan turun ke permukaan Mars, setelah itu akan dikirim untuk mempelajari planet tersebut. Sekarang tugas saya adalah memberi tahu Anda cara mengontrol penjelajah. Ketika penjelajah baru tiba di Mars, Anda akan mengerti apa yang terjadi dan bagaimana semuanya bekerja.
Sebagian besar artikel ini adalah ringkasan dari pengalaman saya dengan Curiosity. Ingatlah bahwa Spirit dan Peluang dalam banyak hal mirip dengan "pewaris" mereka dalam hal ini. Teknologi dan metode yang sama akan digunakan untuk mengelola Perservance, jadi tidak akan ada perbedaan yang signifikan.
Dasar
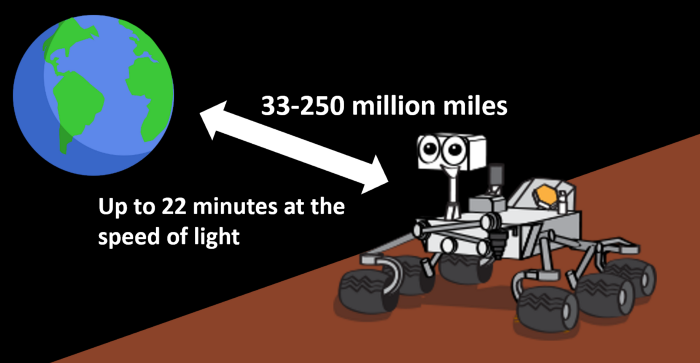
Hal utama yang perlu diketahui adalah Mars sangat, sangat jauh dari kita. Sinyal radio yang dikirim dari Bumi mencapai permukaan Mars dalam 22 menit. Oleh karena itu, kontrol waktu nyata bukanlah pilihan. Selain itu, Curiosity menerima informasi dari Bumi sekali sehari. Sisa waktunya dia sendirian. Pada saat yang sama, kami tidak berbicara tentang otonomi apa pun: penjelajah memiliki serangkaian tindakan terbatas yang dapat dilakukan secara mandiri. Sebagian besar dari apa yang dilakukan penjelajah direncanakan dan ditulis ke dalam memori perangkat di Bumi.
Tentu saja, ada beberapa pengecualian: penjelajah harus dapat menyelesaikan beberapa masalah sendiri. Tetapi sebagian besar keputusan ini "berhenti dan menunggu instruksi dari Bumi sebagai tanggapan atas beberapa faktor eksternal. Aegis memiliki tingkat otonomi tertentu - sebuah sistem yang dapat secara mandiri memilih sebongkah batu tempat Curiosity harus "menembak" dengan laser.
Perhatikan langkahmu
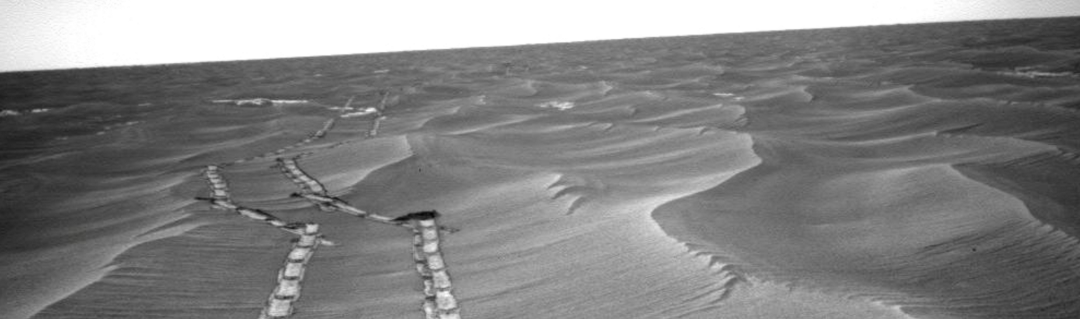
Tugas utama operator penjelajah adalah memastikan keselamatannya di sepanjang perjalanan di Mars. Oleh karena itu, Anda harus mengevaluasi dengan cermat semua kemungkinan opsi untuk tindakan Anda. Penemu NASA memiliki beberapa kamera, berkat itu penjelajah membentuk "gambar" seolah-olah dilihat dengan mata manusia. Ada juga hazcams, “kamera bahaya,” yang menilai masalah di sekitarnya, dan navcams, yang merupakan kamera navigasi yang menilai jalan di depan. Ada juga kamera lain, yang kebanyakan digunakan untuk tugas ilmiah, jadi saya tidak akan menjelaskan cara kerjanya.

Dalam kebanyakan kasus, navcam digunakan untuk menilai bagian trek penjelajah secara visual. Gambar yang mereka terima dapat dilihat sebagai "gambar" tiga dimensi di Bumi. NASA telah mengembangkan perangkat lunak khusus yang dirancang untuk memvisualisasikan area di sekitar rover dan untuk membuat model virtual rover dan area di sekitarnya. Model virtual ini digunakan untuk menguji tindakan yang direncanakan operator. Jika emulasi berjalan dengan baik, perintah dapat dikirim ke Mars. Dengan cara ini, para ilmuwan menyelamatkan diri mereka dari kemungkinan konsekuensi negatif dari pengiriman tim yang tidak terverifikasi.
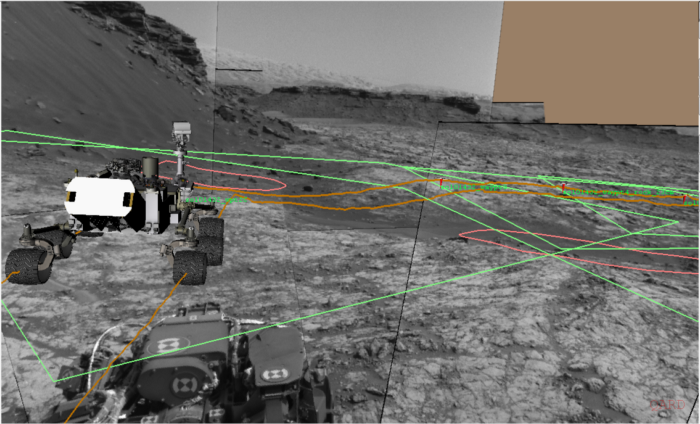
Seperti inilah tampilan gerakan penjelajah yang disimulasikan setelah model benar-benar siap. Area abu-abu adalah bagian Mars yang akan dilalui penjelajah dalam waktu dekat. Garis oranye-coklat sebenarnya adalah jalur penjelajah. Sekitar 30 meter dari permukaan dimodelkan per hari, kamera tidak dapat mengumpulkan lebih banyak informasi, sehingga penjelajah berjalan sejauh itu.
Dan berikut adalah superposisi dari jalur penjelajah yang disimulasikan pada gambar nyata yang diperoleh oleh kamera navigasi.
Saat merencanakan pergerakan bajak, ada beberapa hal penting yang perlu diperhatikan. Misalnya, ukuran benda di sepanjang jalan. Ukuran maksimal yang dapat ditangani penjelajah adalah sekitar 50 cm, sesuatu yang lebih besar dari itu perlu dibulatkan. Pasir (sebenarnya bukan pasir, tapi sebut saja begitu) juga diinginkan untuk ditekuk: jika jumlahnya banyak, penjelajah bisa macet. Bahkan potongan kecil batu pun berbahaya karena ujungnya yang tajam akan merusak roda penjelajah.
Cepat, lambat atau lambat?
Setelah ilmuwan memutuskan arah pergerakan, Anda perlu memahami dengan tepat cara bergerak. Ada tiga mode: mode buta, odometri visual, dan autonav.
Mode buta adalah gerakan yang paling mudah. Dalam hal ini, penjelajah akan mengikuti instruksi yang dikirim dari Bumi, dan tidak memperhatikan apapun. Idealnya, ini adalah metode yang bagus untuk menavigasi penjelajah, tetapi kondisi di Mars jauh dari ideal. Seringkali faktor eksternal mempengaruhi kemajuan menuju tujuan. Ini bisa jadi, misalnya, menggeser roda di permukaan, sehingga penjelajah, alih-alih bergerak 10 meter, bergerak 9 atau bahkan 5.
Cara terbaik untuk memahami apa itu kemudi buta adalah dengan menutup mata dan mencoba mengikuti jalan tertentu. Misalnya, 7 meter ke depan, lalu belok 30 derajat ke kiri dan berjalan lagi 4 meter. Dalam hal ini, kami sama sekali tidak tahu apa yang terjadi di sekitar, dan kami tidak beradaptasi dengan kondisi yang berubah.
Secara umum, kemudi buta bukanlah pilihan terbaik, tetapi memungkinkan penjelajah bergerak cepat, karena sistem tidak perlu berhenti untuk mengambil gambar. Pada kecepatan maksimum, penjelajah dapat menempuh jarak di lapangan sepak bola hanya dalam waktu satu jam. Tetapi opsi ini dipilih hanya jika tidak ada objek yang berpotensi berbahaya di sekitarnya.
Odometri visualdigunakan oleh operator lebih sering. Dalam hal ini, penjelajah berhenti setiap meter untuk mengambil gambar tanah dengan kamera. Komputer yang terpasang kemudian mengevaluasi gambar tersebut, membandingkannya dengan yang sebelumnya, dan mencoba memahami apa yang telah berubah di sekitar, termasuk lokasi penjelajah. Komputer kemudian mengirimkan perintah navigasi baru untuk membuat Anda tetap pada jalurnya.
Cara ini mirip dengan yang sebelumnya, hanya dalam proses memindahkan setiap beberapa langkah Anda harus berhenti untuk membuka mata dan melihat sekeliling.
Odometri visual adalah keseimbangan antara kecepatan dan akurasi gerakan. Metode ini sangat penting karena membantu mendeteksi rintangan di jalur penjelajah dan menghindarinya.
Navigasi otomatis, atau autonav, adalah metode yang paling berteknologi maju. Ini bisa dibandingkan dengan menggunakan drone di dalam mobil. Kami menetapkan tujuan bersama dan penjelajah itu sendiri mencari jalur yang aman dan cepat ke tujuan tersebut. Penjelajah harus berhenti setiap meter untuk menilai situasi menggunakan kamera. Tetapi alih-alih mengambil satu bidikan dengan kamera navigasi, penjelajah tersebut juga menggunakan hazcams. Kemudian komputer terpasang menggabungkan semua informasi ini, membentuk "peta bahaya". Tempat-tempat yang bermasalah ditandai dengan warna merah, tempat-tempat di mana situasinya tidak terlalu parah ditandai dengan warna kuning, dan area yang paling cocok untuk mempromosikan router ditandai dengan warna hijau.

Ini adalah opsi perkembangan paling lambat untuk penjelajah. Jika dalam situasi ideal penjelajah dapat berjalan sepanjang lapangan sepak bola dengan menggunakan metode buta, seperti yang disebutkan di atas (sekitar 100 m), maka dalam kasus moda otonom, dalam kondisi ideal, penjelajah hanya akan menempuh jarak 30 meter.
Pada saat yang sama, penjelajah tidak tahu bagaimana cara mendeteksi pasir atau batu tajam, jadi metode ini hanya digunakan jika area tersebut benar-benar aman.
Apa yang bisa Anda harapkan dari Ketekunan?
NASA mengharapkan penjelajah baru mendarat di permukaan planet pada awal 18 Februari. Setelah itu, saya berharap dia akan mulai pindah ke Mars. Semua yang saya katakan di atas berlaku untuk rover baru, tetapi memiliki kemampuan lebih. Misalnya, ia akan dapat bergerak setidaknya dua kali lebih cepat dari Curiosity: PC onboard memiliki lebih banyak sumber daya komputasi dan algoritme pemrosesan data yang ditingkatkan. Kamera navigasi robot berwarna, mereka menerima gambar dengan resolusi lebih tinggi daripada Curiosity. Selain itu, rover memiliki roda yang lebih tebal dari pendahulunya dan memiliki pola tapak yang berbeda. Ilmuwan yakin kerusakan roda akan berkurang.
Salah satu tugas terpenting bagi penjelajah: mengumpulkan dan menyimpan sampel untuk dikembalikan ke Bumi. Banyak hal tergantung pada keberhasilan misi ini. Dan sekarang, saat penjelajah mulai bergerak, Anda akan mengerti apa dan bagaimana gerakan ini disediakan.
Catatan: Evan Hilgemann adalah insinyur mekanik di Jet Propulsion Laboratory (JPL) NASA.
