
Akselerometer paling sederhana, bagaimana cara kerjanya?
Akselerometer adalah alat yang mengukur proyeksi percepatan semu (perbedaan antara percepatan sebenarnya dari suatu benda dan percepatan gravitasi). Cara kerjanya dapat dijelaskan dengan model sederhana.
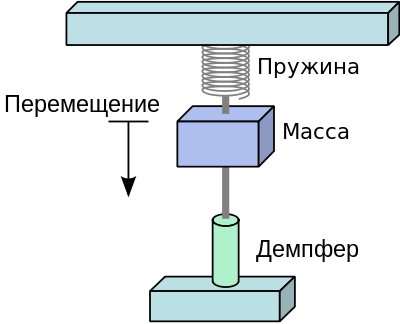
Model perangkat akselerometer mekanis ( asli )
Saat akselerasi bertambah, massa akan meregang pegas. Menurut hukum Hooke dari kurikulum fisika sekolah, Anda dapat dengan mudah menemukan percepatan sistem:
, di mana k adalah koefisien elastisitas pegas, Apakah tegangannya dan m adalah massa beban.
Dengan menggunakan tiga buah sensor yang terletak tegak lurus, seseorang dapat mengetahui percepatan suatu benda sepanjang 3 sumbu, dan mengetahui kondisi awal, menentukan posisi benda di luar angkasa.
Model langsung ini adalah dasar untuk pengoperasian sebagian besar akselerometer, yang dapat dibagi menjadi 3 subkelompok utama:
- mekanis
- elektronik
- piezoelektrik
Ada juga yang termal dan optik, tetapi kami tidak akan mempertimbangkannya. Jika semuanya jelas dengan yang mekanis (pada kenyataannya, pekerjaan mereka tercermin oleh model dari atas), maka dengan elektronik dan piezoelektrik itu sedikit lebih menarik.
Akselerometer piezoelektrik
Jenis sensor ini didasarkan pada efek piezo, yang ditemukan pada tahun 1954 oleh Smith dalam semikonduktor seperti germanium dan silikon. Penemuan ini memberikan dorongan yang kuat untuk pengembangan sensor dan generator. Efeknya adalah pembentukan tegangan oleh elemen piezoelektrik pada saat deformasi.

Animasi efek piezoelektrik ( asli )
Dengan bertambahnya percepatan, massa inert meningkatkan / menurunkan tekanan pada elemen piezoelektrik. Berkat efek piezoelektrik, sinyal yang dihasilkan bergantung pada akselerasi eksternal.

Perangkat akselerometer piezoelektrik ( asli )
Sensor jenis ini membutuhkan penguat tambahan, yang meningkatkan amplitudo sinyal dan menciptakan keluaran impedansi rendah untuk bekerja dengan perangkat eksternal. Preload Bolt digunakan untuk mengkalibrasi nilai percepatan nol, yang massanya dihitung sesuai dengan titik nol percepatan dalam sistem.
Sensor jenis ini masih sangat umum, dan terutama digunakan dalam sistem yang membutuhkan keandalan tinggi - otomotif. Untuk elektronik komersial, sering digunakan akselerometer elektronik, yang lebih kecil dan lebih murah.
Akselerometer elektronik
Prinsip pengoperasian sensor elektronik didasarkan pada perubahan kapasitansi kapasitor dengan perubahan percepatan. Model kerja paling sederhana ditunjukkan pada gambar.
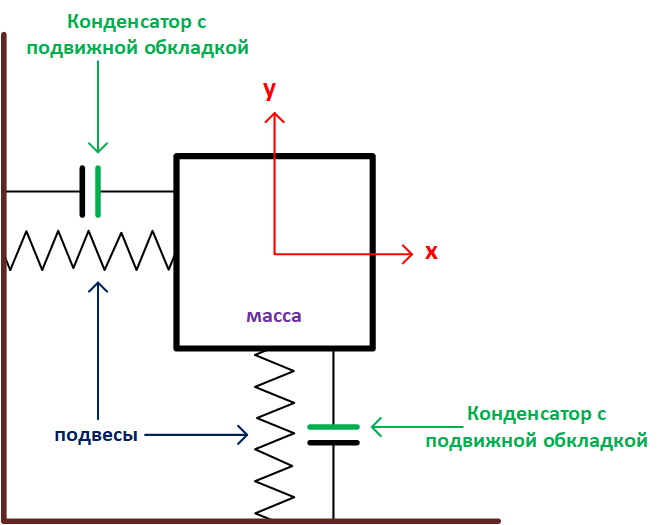
Perangkat akselerometer elektro-mekanis 2 sumbu
Ketika akselerasi berubah, massa mengubah jarak antara pelat kapasitor. Dari rumus paling sederhana untuk kapasitansi kondensor Oleh karena itu, ketika d berubah dalam jarak antara pelat, kapasitansi kapasitor juga akan berubah. Metode ini banyak digunakan karena pengembangan MEMS (MEMS) - sistem mikroelektromekanis.
Teknologi MEMS memungkinkan untuk membuat kapasitor dengan pelat yang dapat dipindahkan pada substrat silikon, yang secara signifikan mengurangi ukuran perangkat, dan yang tidak tidak penting, biayanya.

Perangkat akselerometer elektro-mekanis 2 sumbu (asli dari buku "Introductory MEMS" . Ilustrasi lebih lanjut juga diambil dari buku ini)
Pembaca mungkin memiliki pertanyaan: "bagaimana sebenarnya mendeteksi perubahan kapasitansi kapasitor?" Saya akan mencoba memberikan jawaban lengkap untuk pertanyaan ini.
Perangkat akselerometer MEMS. Bagaimana mengubah perubahan kapasitansi menjadi sinyal?
Setengah jembatan kapasitif
Jadi, sebelum menjelaskan pengoperasian sensor itu sendiri, mari kita beralih ke sirkuit yang cukup populer di sirkuit - jembatan setengah kapasitif.

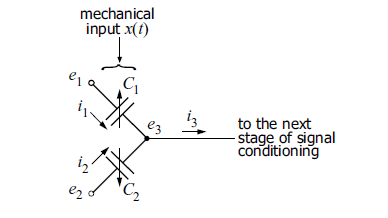
Setengah jembatan kapasitif - dasar dari sensor
tegangan MEMS dan adalah masukan, dan - sinyal keluaran untuk konversi selanjutnya. Kapasitansi kedua kapasitor bergantung pada percepatan eksternal, dan berubah dengan nilai x (t). Pada x = 0, muatan pada kontainer identik, dan pada waktu yang sama ... Asalkan x << d kita menemukan bagaimana perubahan kapasitansi kapasitor tergantung pada perubahan posisi pelat.
Penurunan rumus untuk mengubah kapasitas
Mari kita tuliskan perubahan setiap kapasitansi ketika pelat digeser oleh x:
:
, :
, x <<d, xd d^2 , :
:
, :
, x <<d, xd d^2 , :
Jadi bagian dari jalur telah dilalui, kami mendapatkan bagaimana nilai perubahan kapasitansi bergantung pada perubahan posisi pelat (yaitu, percepatan eksternal). Saatnya mendeteksi perubahan ini: kami memperkenalkan arus tambahan - ... Sekarang tinggal menghitung bagaimana arus keluaran akan tergantung pada perubahan posisi pelat.
Setengah jembatan kapasitif - arus
Penurunan rumus untuk ketergantungan arus keluaran pada perubahan kapasitansi
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
Jadi jika Anda menggunakan potensi yang sama dari tegangan input kami mendapatkan ketergantungan saat ini:
Hasilnya agak aneh: arus keluaran sama sekali tidak bergantung pada perubahan kapasitansi. Untuk mendeteksi perubahan kapasitansi, perlu untuk mengatur tegangan polaritas yang berbeda pada pelat, yaitu: , Sebuah ... Kemudian kami akan mengulangi persamaan tersebut dengan mempertimbangkan modifikasi ini.
Ketergantungan arus pada perubahan posisi pelat, dengan mempertimbangkan polaritas tegangan input yang berbeda
1.3:
:
:
1.2 , :
:
:
1.2 , :
Dari persamaan tersebut terlihat fakta-fakta berikut:
- jika posisi pelat tidak berubah waktu, maka
- Begitu pula jika sumber sinyal konstan (DC), lalu
Untuk operasi efektif dari setengah jembatan kapasitif, perlu menggunakan sinyal input variabel e1 dan e2, pergeseran fasa antara yang akan 180 derajat (sehingga potensi memiliki tanda yang berbeda). Oleh karena itu, kami mendapatkan bentuk sinyal berikut:
dimana - frekuensi sinyal bolak-balik (ditentukan pada tahap desain, tergantung pada bandwidth sistem dan operasi normal wadah mekanis).
Jadi, kita mendapat persamaan (1.4), yang menunjukkan bagaimana perubahan kapasitansi kapasitor mempengaruhi keluaran sistem. Namun, sinyal seperti itu akan memiliki amplitudo yang sangat kecil, selain itu, jika kita menghubungkan beban ke sana untuk berkomunikasi dengan dunia luar, seluruh sistem akan runtuh. Penguat diperlukan di sini ...
Tambahkan saja amplifier
Mari tambahkan penguat ke sistem kita (kita akan berasumsi bahwa gain adalah - prinsip kerja bumi virtual).
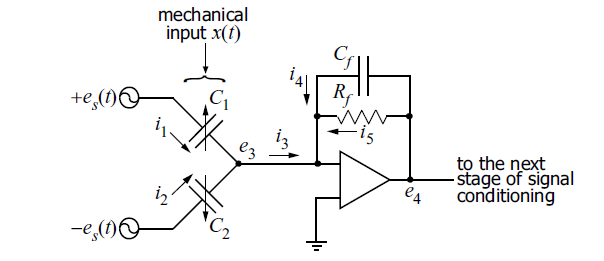
Kapasitif setengah jembatan + integrator
Jadi sekarang kita menemukan ketergantungan tegangan keluaran penguat pada perubahan kapasitansi.
Tegangan keluaran penguat
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
Akibatnya, kita mendapat ketergantungan sinyal keluaran penguat pada perubahan posisi pelat kapasitor. Pembaca yang penuh perhatian harus segera memperhatikan bahwa ini adalah modulasi amplitudo! Memang dalam sistem ini kita memiliki sinyal x (t) yang dikalikan dengan sinyal tersebut dan diperkuat dengan jumlahnya ... Langkah selanjutnya adalah menghapus frekuensi pembawa , dan kita mendapatkan sinyal yang diperkuat x (t) - yang sebanding dengan percepatan. Cara komputasi yang panjang telah membuat kami memahami arsitektur akselerometer MEMS.
Arsitektur akselerometer MEMS
Pertama mari kita pertimbangkan diagram fungsional sensor:
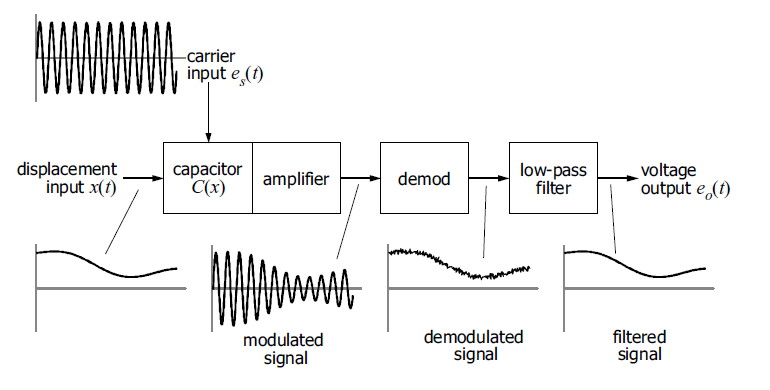
Diagram fungsional akselerometer MEMS.
Awalnya, kami memiliki sinyal x (t) - yang mencerminkan perubahan percepatan. Selanjutnya, kami mengalikannya dengan sinyal pembawa dan diperkuat dengan penguat operasional (dalam mode integrator). Selanjutnya, demodulasi terjadi - sirkuit paling sederhana - dioda dan filter RC (pada kenyataannya, sirkuit rumit digunakan, menyinkronkan proses modulasi dan demodulasi dengan satu frekuensi pembawa ). Kemudian kebisingan sisa disaring menggunakan filter low-pass.
Sebagai contoh, saya akan mengutip salah satu akselerometer MEMS pertama dari Analog Devices - ADXL50:
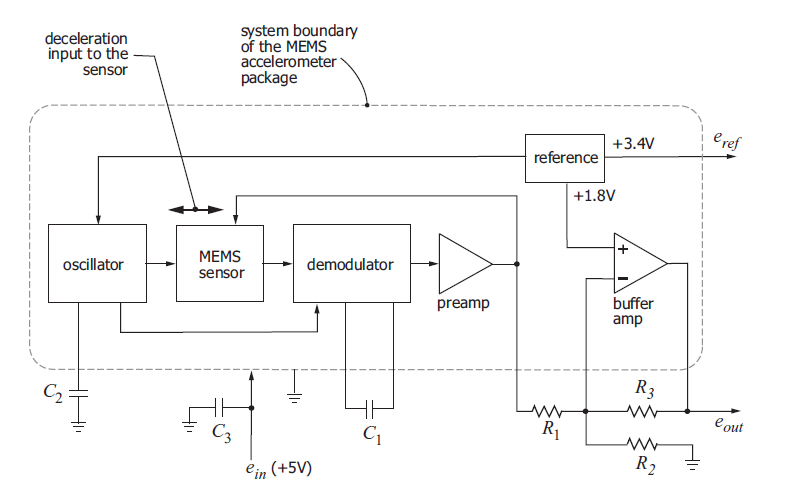
Diagram blok ADXL50
Mungkin, dengan memberikan diagram blok sensor di awal artikel, banyak pembaca yang tidak memahami tujuan dari beberapa blok. Sekarang tabirnya terbuka, dan kita bisa membahasnya masing-masing:
- Blok yang disebut "sensor MEMS" adalah jembatan setengah kapasitif.
- Blok "osilator" menghasilkan sinyal pada frekuensi 1 GHz.
- Sinyal osilator juga digunakan untuk demodulasi sinkron.
- , ( VDD/2- , — «»).
- .
- , .
?
Pilihan transduser untuk bekerja dengan sensor bergantung pada akurasi yang Anda inginkan. Untuk bekerja dengan sensor, ADC dengan arsitektur SAR atau Delta-Sigma dengan kedalaman bit tinggi dapat digunakan. Namun, sensor modern memiliki transduser internal. Para pemimpin di bidang ini adalah STMicroelectronics, Analog Devices dan NXP. Sebagai contoh, kami dapat memberikan sirkuit mikro baru dengan akselerometer 3 sumbu dan ADC bawaan - ADXL362.

Diagram blok ADXL362
Untuk bekerja dengan ADC, filter anti-aliasing ditambahkan ke sirkuit untuk mengecualikan harmonisa tambahan agar tidak memasuki spektrum.
Di mana Anda bisa mendapatkan teknologi seperti itu?
Sekarang ada banyak pabrik yang tersedia untuk perusahaan fabless yang menawarkan teknologi MEMS. Namun, untuk membuat sirkuit mikro modern, perlu untuk mengintegrasikan kapasitas dengan pelat yang dapat dipindahkan ke dalam rute desain standar, karena selain kapasitansi seperti itu, perlu untuk merancang blok tambahan (generator, demodulator, op amp, dll.) Pada satu chip. Sebagai contoh, pabrik TSMC dan XFab menawarkan teknologi untuk mengimplementasikan sensor MEMS bersama dengan seluruh harness. Gambar menunjukkan wadah yang memungkinkan Anda membuat akselerometer tiga sumbu:
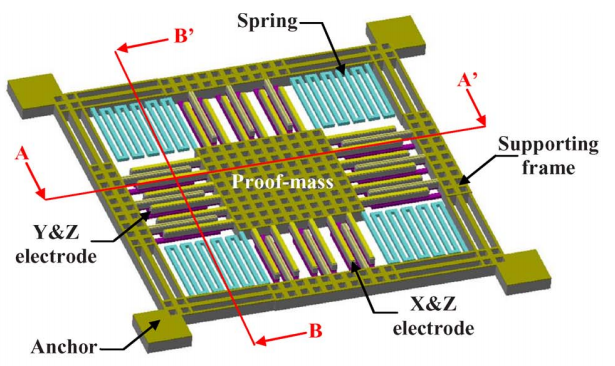
Setengah-jembatan kapasitif tiga sumbu dari TSMC
Ada juga pabrik untuk produksi sensor MEMS, Sovtest, di Rusia , tetapi perusahaan tidak memiliki teknologi untuk mengintegrasikan blok sirkuit tambahan yang diperlukan untuk membuat perangkat akhir dan satu-satunya jalan keluar adalah dengan menggunakan teknologi perakitan mikro .
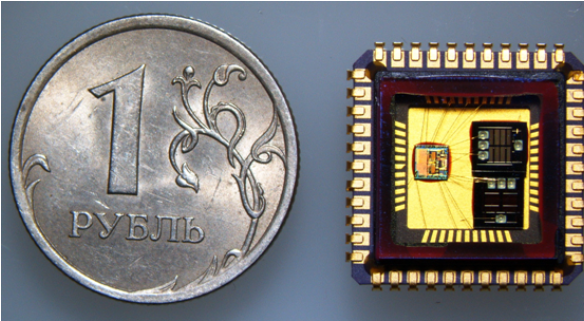
Akselerometer MEMS dikembangkan oleh Sovtest
Perkembangan apa yang dimiliki perusahaan kita dalam hal ini?
Kami memiliki beberapa transduser yang dirancang untuk bekerja dengan sensor. Produk baru meliputi:
- 5101NV035 - Konverter 16 saluran berdasarkan 8 Delta-Sigma ADC, dirancang untuk bekerja dengan sensor arus
- 1316NX035 - Konverter frekuensi tegangan (VFC) integrasi 4 saluran, dirancang untuk bekerja dengan akselerometer dan giroskop 3 sumbu.
Seperti yang saya tulis di artikel sebelumnya , masa tunggu wafer dari pabrik bisa memakan waktu cukup lama. Setelah uji coba pertama ADC 400 MHz, waktu kedatangan pelat dan pengukuran lebih lanjut membutuhkan waktu lebih dari setengah tahun. Selama ini, tim kami berhasil membuat PNC 1316NX035 (pengembangan dari sirkuit sebelumnya 1316PP1U ), yang sedikit dapat saya ceritakan.
Konverter frekuensi tegangan
Untuk mengonversi data dari sensor, SAR atau delta-sigma ADC biasanya digunakan, namun, ada jenis konverter lain - mengintegrasikan VFC, yang memiliki keuntungan signifikan:
- Mereka mengambil lebih sedikit ruang lantai dan memiliki lebih sedikit konsumsi dengan linearitas dan kebisingan yang sama.
- Arsitektur sederhana.
- Kekebalan tinggi untuk memasukkan sinyal gangguan dan gangguan.
- Kekebalan terhadap kebisingan dan gangguan sinyal keluaran.
- Kemampuan untuk mentransfer data tanpa pemrosesan ke saluran komunikasi frekuensi radio.
Microcircuit 1316NX035 adalah konverter tegangan-ke-frekuensi empat saluran dan kode digital; keluaran dari akselerometer tiga sumbu dihubungkan ke tiga saluran utama presisi tinggi. Saluran ke-4 memiliki multiplekser 4 saluran masukan, yang dengannya sensor sistem tambahan dapat dihubungkan: suhu, kelembapan, dll. Di bawah mikroskop, rangkaiannya terlihat seperti ini:
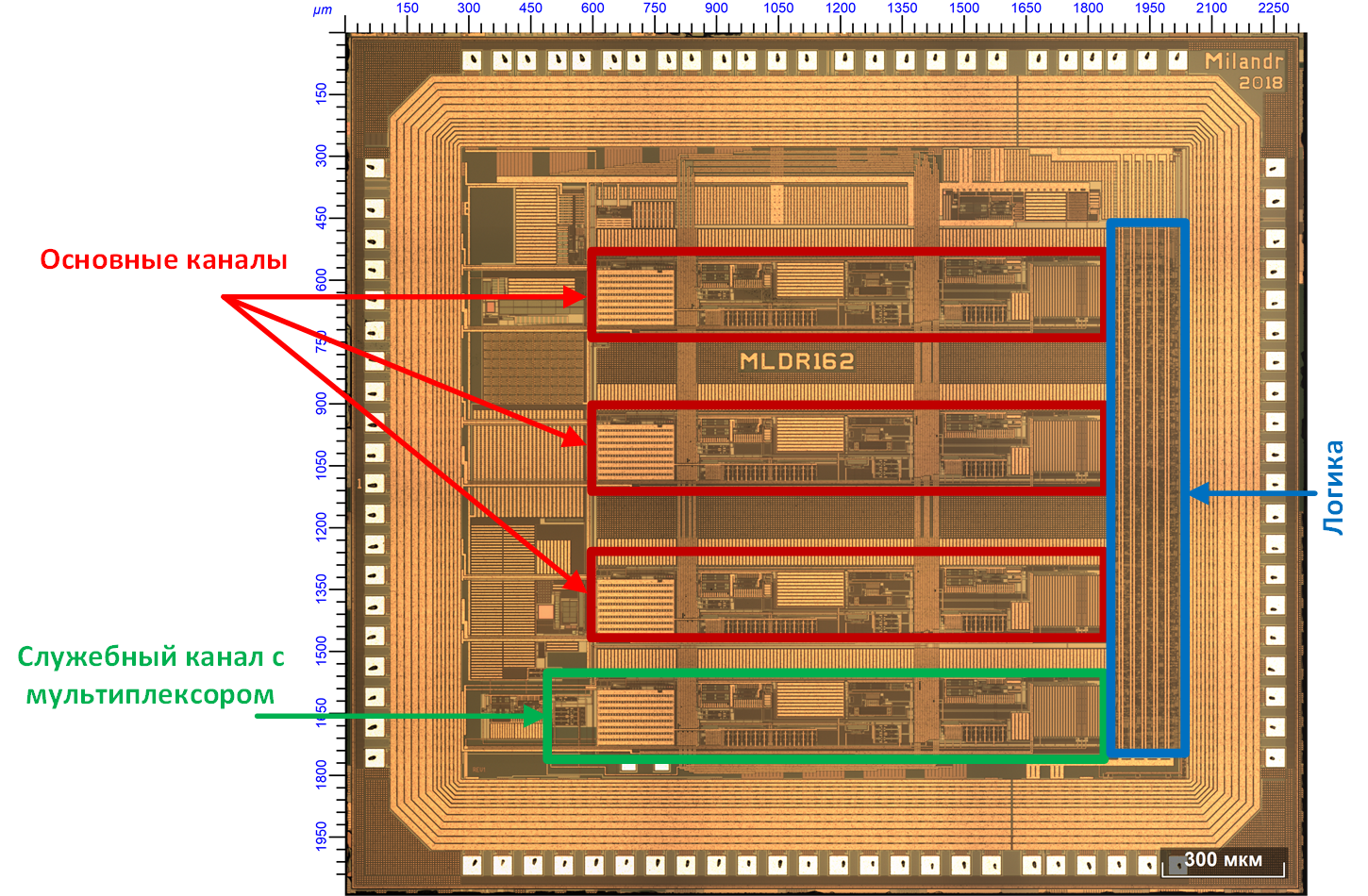
VFC di bawah mikroskop
Masing-masing dari tiga saluran utama mengubah tegangan masukan dalam kisaran ± 4V ke frekuensi hingga 1250 kHz pada 3 keluaran, sesuai dengan tegangan masukan positif dan negatif. Juga, sirkuit mikro memiliki pencacah balik 16-bit di setiap saluran untuk menghitung pulsa frekuensi. Antarmuka SPI digunakan untuk mengontrol mode konversi dan mengambil sampel konten penghitung pulsa saluran. Persyaratan utama untuk parameter PNC adalah:
- stabilitas termal dan temporal tinggi dari frekuensi output pada sinyal input nol (input ground)
- rentang dinamis konversi - tidak kurang dari 22 bit
- kontinuitas konversi sinyal input dan tidak dapat diterimanya hilangnya pulsa frekuensi tunggal.
Untuk memenuhi persyaratan 1 dan 2, autocalibration analog digunakan , yang dilakukan secara otomatis saat rangkaian dihidupkan, dan juga dapat dimulai kapan saja dengan perintah melalui antarmuka SPI. Persyaratan 3 disediakan dan dijamin oleh solusi sirkuit. Itu mungkin untuk mencapai parameter akurasi yang cukup baik: nonlinier konversi tipikal adalah 30 ppm, dan offset nol kurang dari 0,1 Hz dengan faktor konversi 200 kHz / V. Rentang konversi dinamis: fmax / fmin = 2 * 1.25MHz / 0.3Hz ∿ 8.33M, yang sesuai dengan lebih dari 23 bit.
Hanya ada satu "tetapi" - nutrisi bipolar. Untuk memastikan stabilitas nol yang baik (tegangan yang sesuai dengan akselerasi 0g), suplai bipolar harus digunakan. Solusi ini cukup efektif - bagaimanapun juga, ketika 0g sesuai dengan "ground", sistem akan stabil secara apriori. Ini juga meningkatkan desain sistem. Dalam sensor modern, setengah dari pasokan Vdd / 2 digunakan sebagai nol, tetapi jika tegangan pada konverter berbeda dengan tegangan pada sensor, kami secara otomatis mendapatkan offset yang perlu dikalibrasi tambahan.
Mungkin, bagi banyak konsumen, tegangan bipolar sedikit menakutkan, dan kami, sebagai pengembang, memahami ini. Mungkin kedepannya kami akan membuat versi komersial untuk MEMS (atau mengintegrasikan sensor ke dalam PNC). Sejauh ini, tentu saja, ini hanya rencana, tetapi saya yakin mereka akan melihat terang hari.
PS Menemukan foto bonus dari proses penelitian sampel. Secara umum, bagi saya ini adalah bagian yang paling menarik dari proses pengembangan. Mereka memberi Anda di tangan Anda gagasan Anda di tengah panasnya pabrik, Anda memasoknya dengan kekuatan dan menyilangkan jari Anda menunggu - "apakah itu berhasil atau tidak?"

PPS Siapa pun yang menyukai topik sensor, di masa mendatang seorang rekan dari pusat desain perangkat keras ingin berbicara tentang sistem inersia yang dibuat berdasarkan sensor MEMS - SINS .