Foto di bawah ini menunjukkan kristal 8086 di bawah mikroskop. Lapisan logam terlihat di atas chip, di mana substrat silikon dan lapisan polysilicon dengan konduktor disembunyikan. Di sepanjang bagian luar lingkaran kristal, ikatan kawat kecil menghubungkan bantalan kristal ke kaki bagian luar. 8086 memiliki power pad di bagian atas dan ground pad di bagian atas dan bawah. Masing-masing memiliki dua kabel untuk kawat las, yang menggandakan arus yang didukung. Jalur logam lebar terlihat memanjang dari bantalan daya dan arde. Mereka mendistribusikan daya ke seluruh chip.
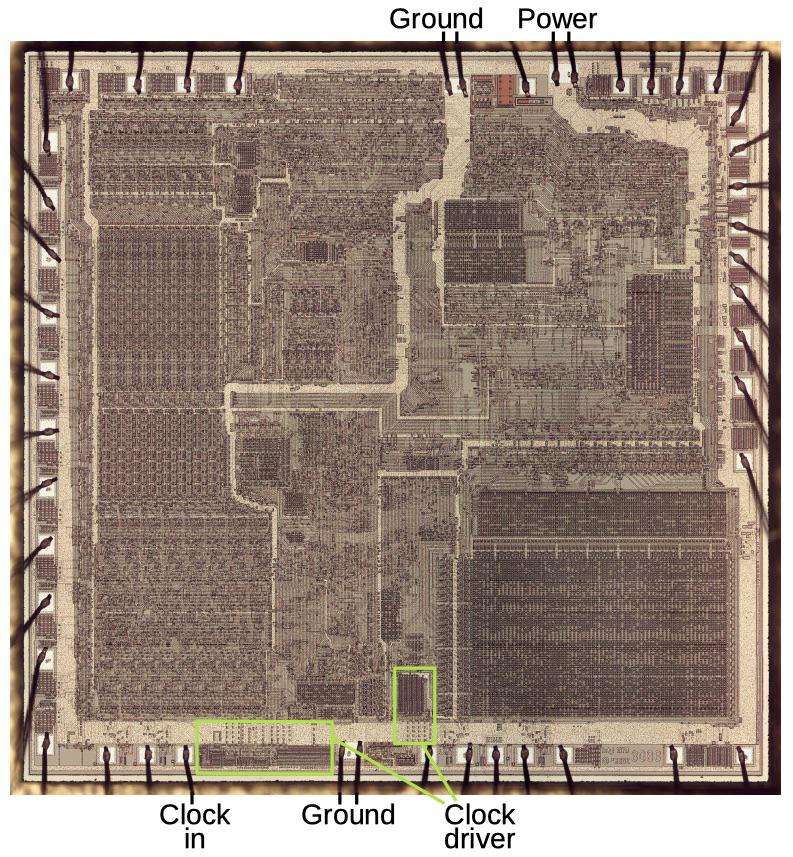
Foto kristal 8086, di mana Anda dapat melihat lokasi catu daya (atas) dan kontak arde (atas dan bawah). Sirkuit waktu terletak di bagian bawah.
Ada dua sinyal jam internal yang bertanggung jawab untuk sinkronisasi di 8086. Osilator eksternal memasukkan sinyal jam ke 8086 melalui papan jam input di bawah ini. Generator jam internal menyediakan dua sinyal jam arus tinggi berdasarkan sinyal eksternal. Perhatikan bahwa driver jam membutuhkan footprint yang besar pada chip.
Pada artikel ini, saya akan menjelaskan bagaimana 8086 mengalihkan energi dan sinyal clock ke seluruh chip, dan bagaimana sirkuit jam menghasilkan pulsa clock yang diperlukan.
Distribusi tenaga
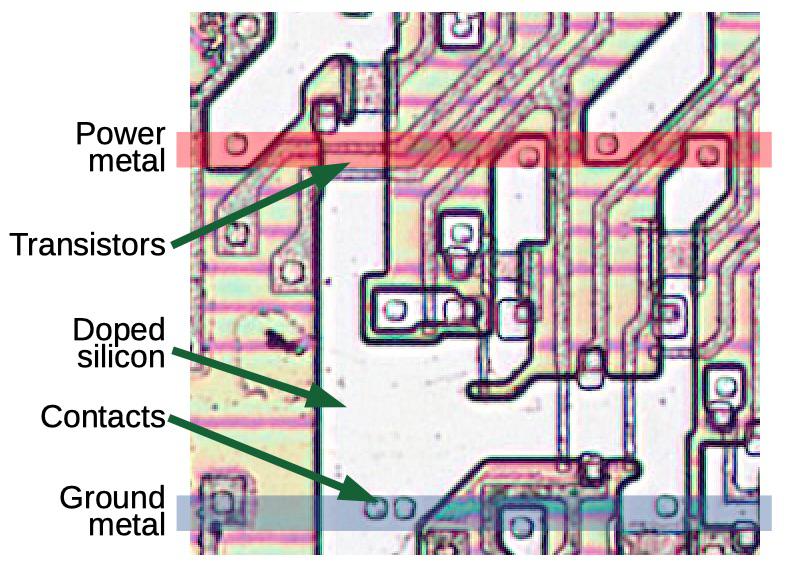
8086 terdiri dari tiga lapisan yang masing-masing dapat menampung konduktor. Lapisan logam di atas paling baik untuk ini karena resistansi logam yang rendah. Di bawah logam ada lapisan konduktor polysilicon, yang terdiri dari jenis silikon khusus. Hambatan dari polysilicon lebih tinggi dari pada logam, tetapi masih dapat digunakan untuk mengirimkan sinyal ke seluruh chip. Transistor terbentuk pada substrat silikon. Resistensi silikon relatif tinggi, sehingga hanya digunakan untuk mengirimkan sinyal dalam jarak pendek - misalnya, di dalam gerbang.
Distribusi daya dalam sebuah chip seperti 8086 adalah teka-teki topologi. Karena resistansinya yang rendah, lapisan logam tetap menjadi satu-satunya lapisan praktis yang berguna untuk kabel listrik dan arde. Hampir semua gerbang pada chip harus dialiri daya dan arde. Dan karena chip memiliki satu lapisan logam, daya dan arde tidak dapat berpotongan.
Hampir semua gerbang pada chip membutuhkan daya dan arde karena gerbang MOS standar memerlukan arde untuk jaringan pull-down dan daya untuk resistor pull-up. Namun, ada beberapa pengecualian. 8086 menggunakan gerbang logika dinamis, terutama di ALU - untuk kecepatan. Gerbang ini ditarik ke atas oleh sinyal sinkronisasi, sehingga tidak membutuhkan catu daya langsung. 8086 juga menggunakan beberapa gerbang XOR pada transistor feed-through, yang ditarik ke bawah oleh sinyal yang masuk, sehingga tidak membutuhkan ground.
Microcode ROM membentuk bagian besar dari chip yang tidak membutuhkan daya, hanya arde. Ini karena setiap baris ROM diimplementasikan sebagai gerbang NOR yang sangat besar, dan daya yang menariknya terletak di tepi kanan. Oleh karena itu, semua gerbang ROM memiliki daya dan arde, meskipun ROM tampaknya tidak memiliki sambungan daya.
Diagram di bawah menunjukkan konduktor logam di 8086. Catu daya yang terhubung ke pin daya di atas ditunjukkan dengan warna merah. Cabang makanan yang kuat turun dan ke kanan, lalu bercabang menjadi banyak cabang. Daya juga mengalir di sepanjang tepi seluruh chip, memberikan daya ke pin I / O.
Dengan IC, sering terjadi bahwa daya dan arde terletak di sudut yang berlawanan atau di sisi chip yang berlawanan. Pengaturan ini memudahkan untuk mengarahkan jalur listrik dan tanah yang tidak saling bersinggungan. Seri 8086 memiliki posisi daya dan arde yang sedikit tidak biasa pada pin yang berlawanan secara diagonal, dan arde kedua lebih dekat ke pin daya. Jaringan listrik dan tanah di chip bercabang seperti pohon. Jaringan-jaringan ini bercabang dan, seperti jari-jari yang terjalin, menjangkau semua bagian chip.
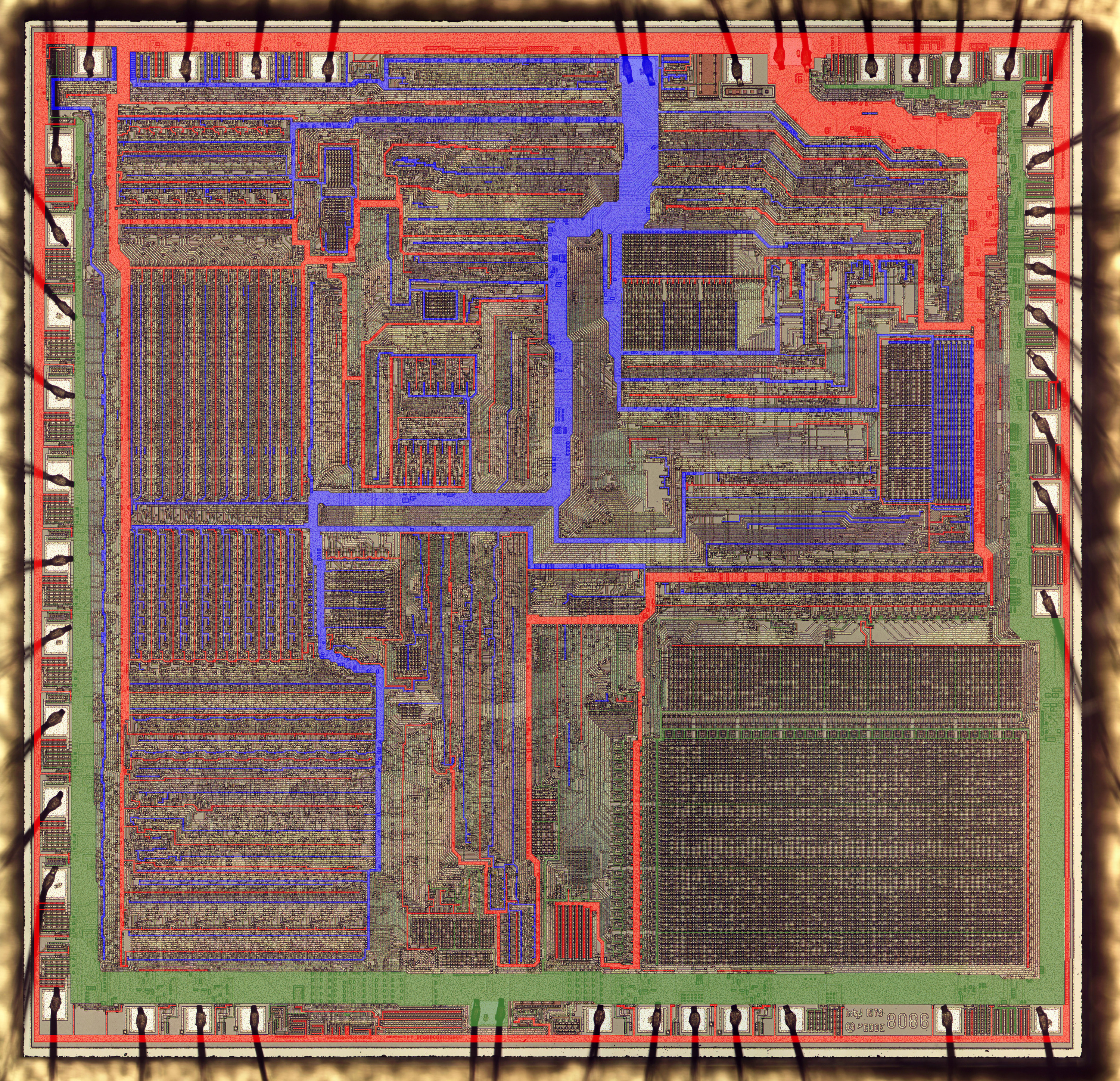
Daya (merah) dan arde (biru, hijau) pada lapisan logam chip
Ada dua kontak dasar. Trek yang ditandai dengan warna biru terhubung ke pin ground atas, dan yang hijau ke bawah. Jalur tanah bertanda biru menunjukkan percabangan tebal ke bawah melalui pusat chip dan bercabang dengan cara yang rumit ke segala arah. Jalur hijau membentang di sepanjang sisi bawah, kiri dan kanan chip, mendukung pin I / O serta menghubungkan ke ROM microcode di kanan bawah.
Semakin jauh dari sumber listrik dan semakin dekat ke titik akhir, konduktor listrik menjadi lebih tipis dan arus berkurang. Ini dapat dilihat pada konduktor listrik ke alamat dan pin data di bawah ini. Di sebelah kiri di bawah kontak, konduktor dengan tanah sangat lebar, tetapi secara bertahap menyempit, ke kanan. Dengan kata lain, di sebelah kiri, konduktor harus mengalirkan arus dari semua kontak, dan di sisi paling kanan, hanya dari satu.

Sambungan alamat dan pin data ke ground semakin tipis (sisi kiri chip diputar 90 °)
Lapisan logam digunakan untuk membawa banyak sinyal, tidak hanya power dan ground. Karena impedansinya yang rendah, ini adalah lapisan transmisi sinyal terbaik. Namun, penggunaan daya dan konduktor arde yang meluas membatasi kemampuan lapisan logam. Untuk menghindari persilangan, sebagian besar jalur sinyal pada lapisan logam berjalan sejajar dengan jalur daya. Lapisan polysilicon di bawahnya digunakan untuk transmisi sinyal tegak lurus. Tetapi apa yang terjadi jika konduktor logam perlu melintasi jalur listrik atau ground? Solusinya adalah menggambarnya dari bawah [silang]. Sinyal turun ke level polysilicon, melintasi trek, dan kemudian naik kembali, seperti yang ditunjukkan di bawah ini.
Penyeberangan dasar seperti itu digunakan dalam banyak kasus, tidak hanya dengan makanan. Namun, yang paling sering adalah tentang nutrisi. Biasanya, konduktor logam digunakan untuk mengirimkan sinyal dalam satu arah, dan konduktor polisilikon digunakan untuk mengirimkan sinyal ke arah tegak lurus. Di tempat yang berbeda pada chip, arah ini berubah, dan bergantung pada arah transmisi sinyal yang dominan. Oleh karena itu, sebagian besar, sinyal berjalan tanpa hambatan. Namun mereka sering harus melompat dari lapisan ke lapisan.
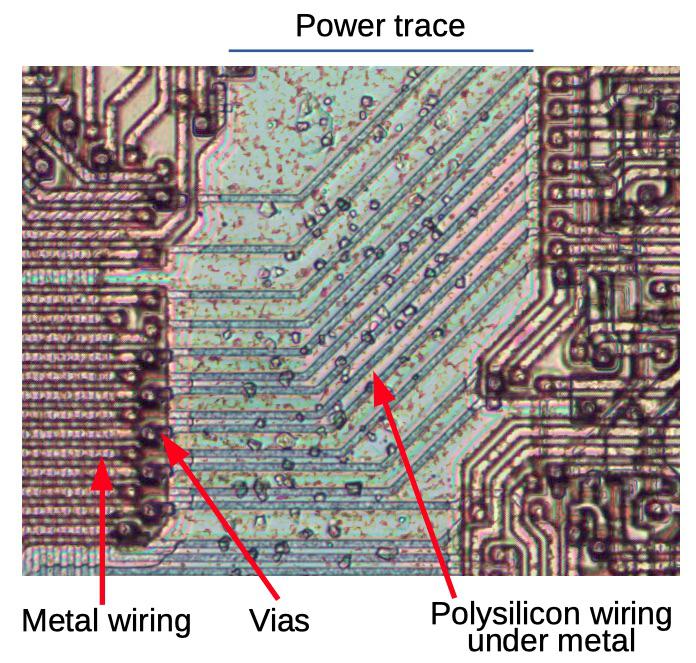
Sinyal pada lapisan logam melintasi jalur suplai dari bawah melalui lapisan polisilikon
Jika daya dan arde hampir seluruhnya dialihkan ke lapisan logam, di beberapa tempat sirkuit ini rusak, dan jalur yang melewati bagian bawah digunakan untuk memasok daya. Ini lebih sering terjadi di bagian paling akhir dari trek, di mana arusnya sudah rendah. Salah satu contoh ditunjukkan di bawah - di mana tanah melewati dua kali dari bagian bawah lapisan logam menggunakan konduktor polisilikon. Untuk mengurangi resistansi, jalur bypass ini dibuat lebih lebar daripada jalur sinyal dan juga menggunakan silikon dan polisilikon bersama. Lingkaran-lingkaran kecil melalui kontak [melalui] antara lapisan logam dan polisilikon.
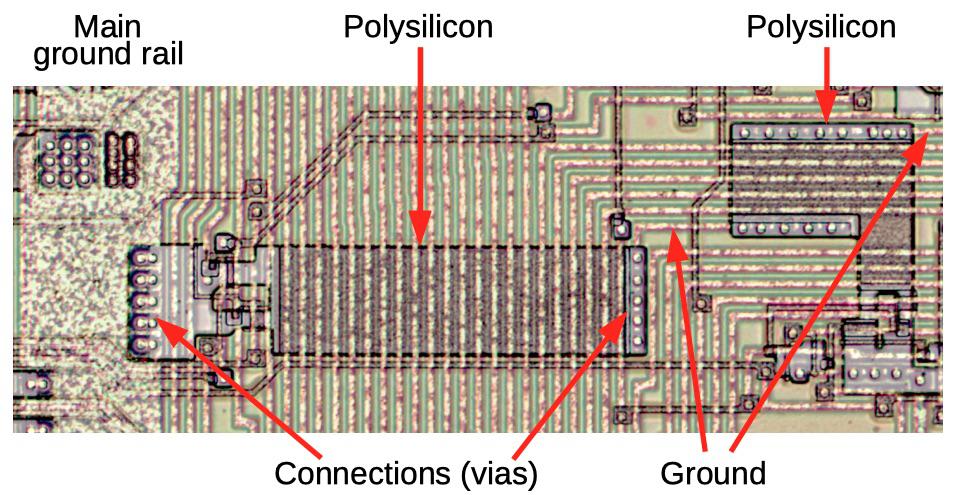
Foto komposit yang menunjukkan jalur bypass ground yang berjalan melalui polysilicon di bawah jalur sinyal.
Lapisan silikon memainkan peran kecil dalam kabel daya. Secara khusus, banyak gerbang direntangkan untuk mencapai kekuatan dan tanah dari sisi lain. Foto di bawah ini menunjukkan gerbang 8086. Perhatikan area besar silikon terkotori (putih) yang ditarik keluar untuk mencapai tanah dan rel listrik. Hanya sebagian kecil dari silikon yang digunakan untuk transistor, dan yang lainnya tampak seperti membuang-buang ruang. Namun, bagian silikon yang kosong ini menghubungkan gerbang ke konduktor logam yang memasok daya dan arde. Karena silikon memiliki ketahanan yang relatif tinggi, area yang luas digunakan untuk ini, dan sambungannya sendiri diperpanjang untuk jarak pendek.
Gerbang yang dibuat dengan silikon yang diolah dapat diperpanjang untuk mencapai rel listrik dan ground. Untuk foto ini, lapisan logam telah dihilangkan.
Setelah 8086 diperbarui dan secara fisik menyusut, ada masalah kabel daya lainnya. Dengan peningkatan teknologi manufaktur, Intel menskalakan kristal - membiarkan sirkuit tetap sama, tetapi menguranginya secara proporsional. Sayangnya, mengurangi ukuran jalur catu daya juga mengurangi arus maksimum. Untuk mengatasi masalah ini, jalur daya di sekitar chip diperkuat dan sirkuit internal serta kabel dikurangi. Ini dapat dilihat pada foto di bawah - misalnya, ada lebih banyak trek listrik di sudut kanan bawah dari 8086 yang lebih kecil.
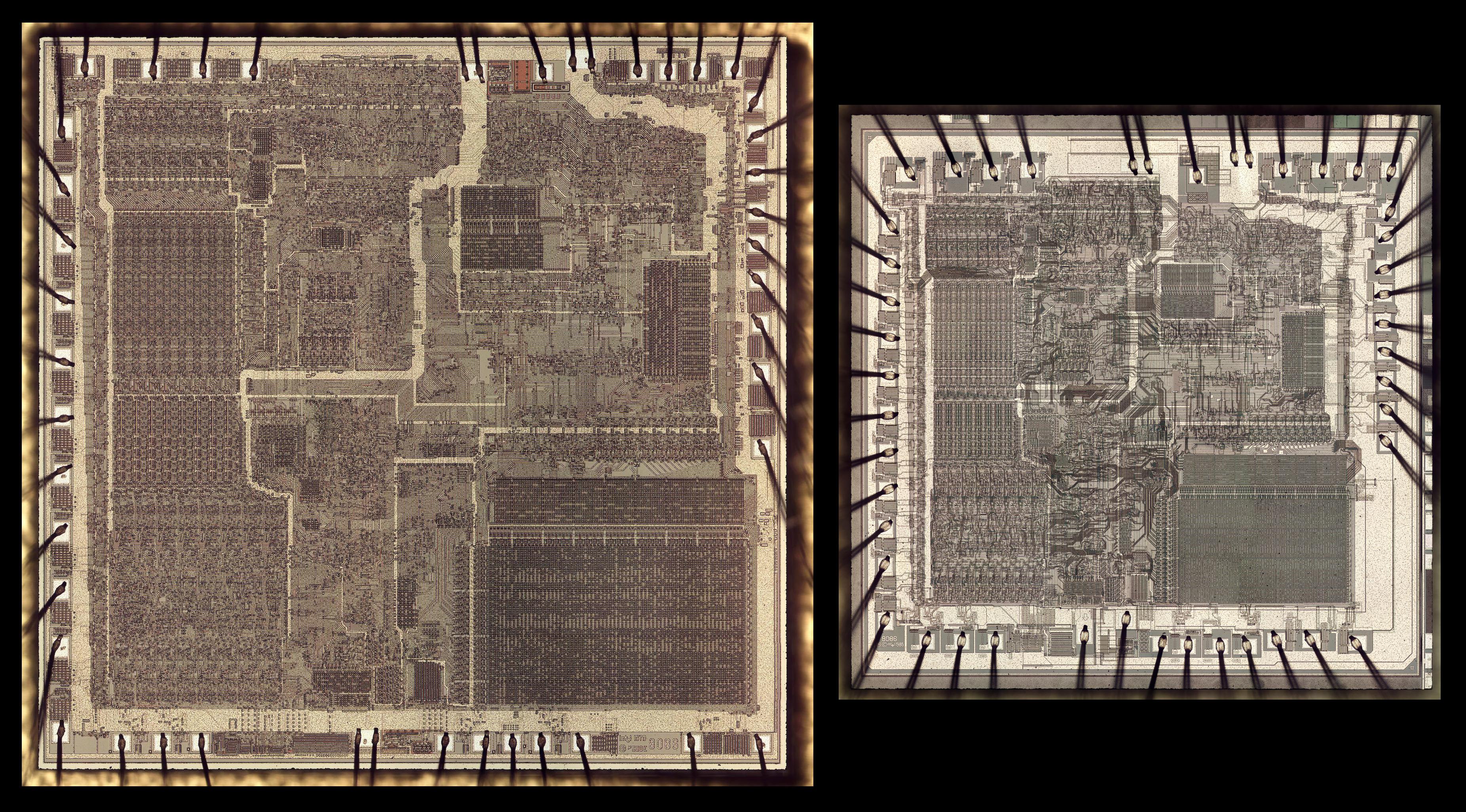
Dua versi 8086 pada skala yang sama. Kristal di sebelah kanan adalah versi yang lebih baru, ukurannya diperkecil.
Hampir semua komputer menggunakan sinyal clock untuk mengontrol waktu prosesor. 8086, seperti kebanyakan mikroprosesor, menggunakan driver jam dua fase secara internal. Pengemudi jam dua fase memiliki dua jam - ketika yang pertama tinggi, yang kedua rendah, dan sebaliknya, seperti yang ditunjukkan di bawah ini. Beberapa sirkuit dihidupkan dengan sinyal sinkronisasi pertama, dan yang lainnya dengan sinyal sinkronisasi kedua. Skema operasi 8086 menyiratkan bahwa tidak ada tumpang tindih antara dua fase sinyal sinkronisasi dan asimetri mereka - ada celah antara saat-saat ketika satu sinyal sinkronisasi menjadi rendah dan yang kedua naik.
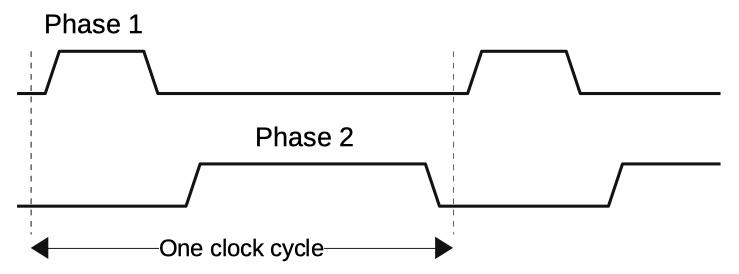
Driver jam dua fase terdiri dari dua sinyal clock dengan polaritas yang berlawanan
Meskipun hampir semua komputer menggunakan sinyal clock untuk sinkronisasi, mesinArsitektur IAS (populer di tahun 1950-an) tidak sinkron, dan dioperasikan tanpa sinyal jam. Sebagai gantinya, setiap sirkuit, setelah selesai, mengirim pulsa ke sirkuit berikutnya, memicu langkah berikutnya. Banyak komputer awal tahun 1950-an didasarkan pada arsitektur ini, termasuk CYCLONE, ILLIAC, JOHNNIAC, MANIAC, SEAC, dan IBM 701. Penelitian tentang kemungkinan komputasi asinkron terus berlanjut , tetapi sistem sinkron jelas mendominasi.
Prosesor, antara lain, menggunakan sinyal jam untuk mencegah umpan balik yang tidak diinginkan di sirkuit. Misalnya, pertimbangkan penghitung perangkat lunak yang rantainya meningkatkan nilainya dan memasukkannya kembali ke penghitung. Anda tidak ingin nilai baru terus meningkat.
Salah satu metodenya adalah dengan menggunakan pemicu yang memperbarui nilai ketika sinyal berubah dari rendah ke tinggi. Kemudian penghitung akan diperbarui satu-satunya waktu, yang diperlukan. Namun, dengan sinyal sinkronisasi dua fase, rangkaian dapat dibuat pada kait yang peka level, yang desainnya jauh lebih sederhana daripada pemicu yang peka terhadap perubahan sinyal. Ketika sinyal sinkronisasi pertama tinggi, paruh pertama anak tangga menerima nilai input dan melakukan kalkulasi logis. Ketika sinyal sinkronisasi kedua tinggi, bagian kedua dari rantai menerima hasil dari paruh pertama dan melakukan semua perhitungan yang diperlukan, dan bagian pertama diblokir. Intinya adalah bahwa hanya setengah dari rantai yang dapat diperbarui pada satu waktu, yang mencegah umpan balik yang tidak diinginkan.
8086 memiliki persyaratan jam input yang ketat, yang harus tinggi untuk sepertiga waktunya. Biasanya, 8086 dihasilkan oleh chip 8284 dan kristal kuarsa. Chip membagi sinyal clock masuk dengan 3 untuk menyediakan 33% dari clock siklus tugas yang dibutuhkan oleh 8086.
Dalam prosesor modern, tata letak sinyal clock sangat kompleks karena sinyal harus berjalan ke semua bagian chip secara bersamaan. Prosesor modern menggunakan hierarki jalur jam, menyeimbangkan waktu perjalanan di sepanjang jalur, dan sering kali menyediakan buffering terpisah untuk setiap jalur. Sebagai perbandingan, tata letak sinyal clock 8086 sangat mudah, karena frekuensi clocknya 5-10 MHz beberapa kali lipat lebih rendah daripada prosesor modern. Pada frekuensi yang relatif rendah ini, panjang jalur tidak terlalu penting, sehingga pulsa clock 8086 dapat mengikuti jalur yang berliku.
Karena 8086 menggunakan logika dinamis, ia juga memiliki kecepatan clock minimum 2 MHz. Jika frekuensinya lebih rendah, terdapat risiko kebocoran biaya sebelum biaya diperpanjang, yang dapat menyebabkan kegagalan. Frekuensi clock minimum tidak nyaman dari sudut pandang debugging, karena tidak mungkin memperlambat atau menghentikan sinyal clock.

Jalur sinkronisasi di 8086. Hijau adalah sinkronisasi pertama dan merah adalah yang kedua, dengan fase berlawanan
Diagram di atas menunjukkan jalur jam 8086. Fase 1 berwarna hijau dan fase 2 berwarna merah. Di bagian bawah chip, sirkuit driver jam muncul sebagai titik besar. Dari sana, sinyal sinkronisasi bercabang di seluruh chip. Untuk sebagian besar, dua fase clock berjalan secara paralel, berlawanan dengan daya dan ground dengan cabang yang berlawanan.
Karena sinyal sinkronisasi berjalan ke semua bagian chip, mereka membutuhkan lebih banyak arus daripada sinyal konvensional, dan oleh karena itu sebagian besar dialihkan ke lapisan logam. Ketika sinyal sinkronisasi perlu melintasi jalur listrik, mereka lewat di bawahnya, seperti yang ditunjukkan di bawah ini. Perhatikan bahwa solusi sinkronisasi memiliki bentuk yang tidak teratur - solusi tersebut lebih dari sekadar solusi untuk sinyal lain, seperti bus Q.
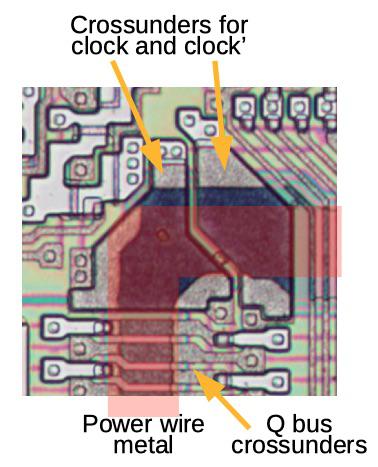
Jalur bypass catu daya cukup besar. Bus Q (mentransmisikan perintah dari antrian perintah ke decoder) memiliki lebih sedikit.
Untuk memberikan sinyal sinkronisasi arus tinggi, rangkaian pembentuknya dibangun di atas transistor besar. Foto di bawah ini membandingkan salah satu transistor ini dengan transistor logika yang khas. Transistor driver berukuran sekitar 300 kali lebih besar, sehingga mampu menghasilkan sekitar 300 kali arus. Transistor terdiri dari 10 transistor yang ditempatkan secara paralel - 10 garis polisilikon vertikal membentuk 10 gerbang. Setiap sinyal sinkronisasi dihasilkan oleh sepasang transistor besar, salah satunya menariknya ke atas dan yang lain ke bawah.

Transistor besar pada driver jam dibandingkan dengan transistor logika yang berdekatan
Foto di bawah ini menunjukkan skema generator pulsa sinkron. Sirkuit membagi sinyal clock eksternal menjadi dua fase, memastikan bahwa sinyal tersebut tidak tumpang tindih, dan memperkuatnya. Kotak merah muda di sebelah kiri adalah platform untuk penggerak jam eksternal. Sinyal berjalan melalui serangkaian transistor yang berakhir di transistor driver besar di sisi kanan. Konduktor coklat adalah polysilicon yang membentuk gerbang. Banyak transistor memiliki gerbang zig-zag sehingga transistor besar muat di ruang kecil.
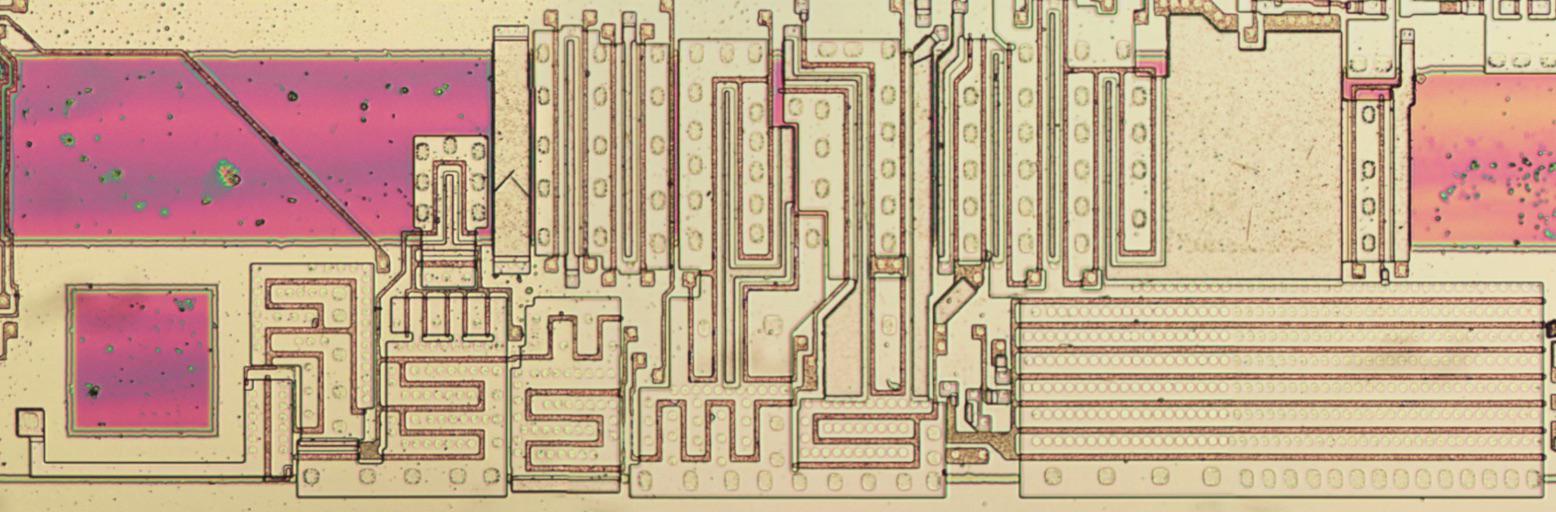
Sirkuit driver jam pada chip. Lapisan logam telah dihilangkan. Transistor besar terlihat. Pin input sinkronisasi eksternal - kotak merah muda di sebelah kiri.
Di bawah ini adalah diagram skema generator jam yang sedikit disederhanakan. Segitiga adalah driver arus tinggi yang terbuat dari dua atau tiga transistor. Input pembalik (lingkaran) menarik output ke bawah. Di sisi kiri pin sinkronisasi input, terdapat resistor dan dioda kecil untuk melindunginya (sama seperti pin input lainnya). Sinyal sinkronisasi kemudian dibagi menjadi fase terbalik (atas) dan fase terbalik (bawah).
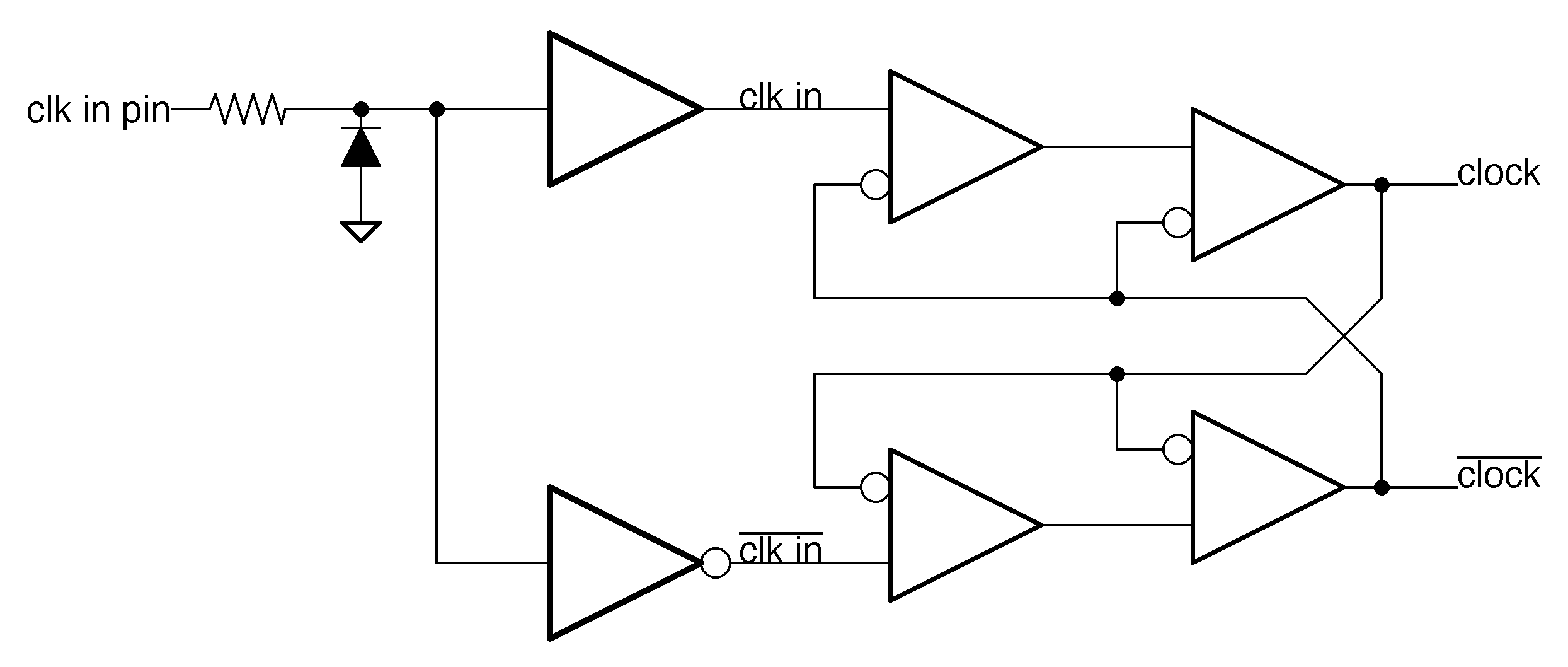
Diagram skema yang disederhanakan dari generator jam 8086
Sirkuit tambahan mencegah sinyal sinkronisasi dari tumpang tindih: ketika satu sinyal tinggi, ini, melalui input terbalik, menyebabkan sinyal kedua menjadi rendah. Untuk memahami cara kerjanya, mari kita mulai dengan momen ketika sinyal pada clk di pin tinggi. Sinyal clk in dan clock tinggi, sedangkan ^ clk in ^ dan ^ clock ^ rendah. Sekarang, katakanlah sinyal yang masuk ke clk in menjadi rendah, yang menyebabkan sinyal clk in turun dan pada ^ clk in ^ naik. Namun, keluaran ^ clock ^ tidak dapat naik hingga jam mati. Setelah itu, sinyal ^ clk in ^ akan melewati driver bawah, menarik ^ clock ^ ke atas setelah dua penundaan gerbang. Intinya adalah bahwa jam dan ^ jam ^ tidak berpindah pada waktu yang bersamaan. Setelah satu turun, ada penundaan sebelum yang lain naik tinggi.Hasilnya, kami mendapatkan sinyal sinkronisasi yang tidak tumpang tindih.
Ini adalah deskripsi yang cukup kasar - khususnya, saya tidak yakin apa yang terjadi ketika satu transistor menarik sinyal ke atas dan yang lain menarik sinyal yang sama ke bawah. Simulasi proses yang tepat akan bergantung pada ukuran relatif dari kedua transistor.
Kesimpulan
8086 menggunakan tata letak daya yang menarik, tetapi prosesor modern beroperasi pada level yang sama sekali berbeda. Jika 8086 membutuhkan 350mA, maka prosesor modern mungkin membutuhkan lebih dari 100A. 8086 menggunakan 3 dari 40 kakinya untuk daya dan arde. Prosesor Intel Core i5 modern memiliki 128 pin daya dan 377 - ground (dari total 1151 pin). Sementara banyak lapisan logam dalam chip modern memecahkan masalah kabel 8086, mereka memperkenalkan komplikasi baru seperti membagi chip menjadi beberapa bagian daya, yang memungkinkan Anda untuk mematikan bagian yang tidak digunakan.
Dalam prosesor modern dengan kecepatan multi-gigahertz, kabel sinyal sinkronisasi jauh lebih rumit, karena satu milimeter trek ekstra dapat berdampak negatif pada sinyal sinkronisasi. Untuk mengatasi masalah ini, prosesor modern menggunakan hal-hal seperti pohon-H atau jaringan distribusi jam, bukan hanya jalur bercabang seperti 8086. Sedangkan 8086 memiliki sirkuit pembangkit clock dua fase sederhana, prosesor modern sering menggunakan loop fase terkunci untuk mensintesis sinyal clock. , dan banyak sirkuit yang tersebar di seluruh chip yang menyediakan dan mengontrol sinyal jam. Tetapi meskipun 8086 jauh lebih sederhana daripada prosesor modern, ia berisi banyak contoh sirkuit yang menarik.