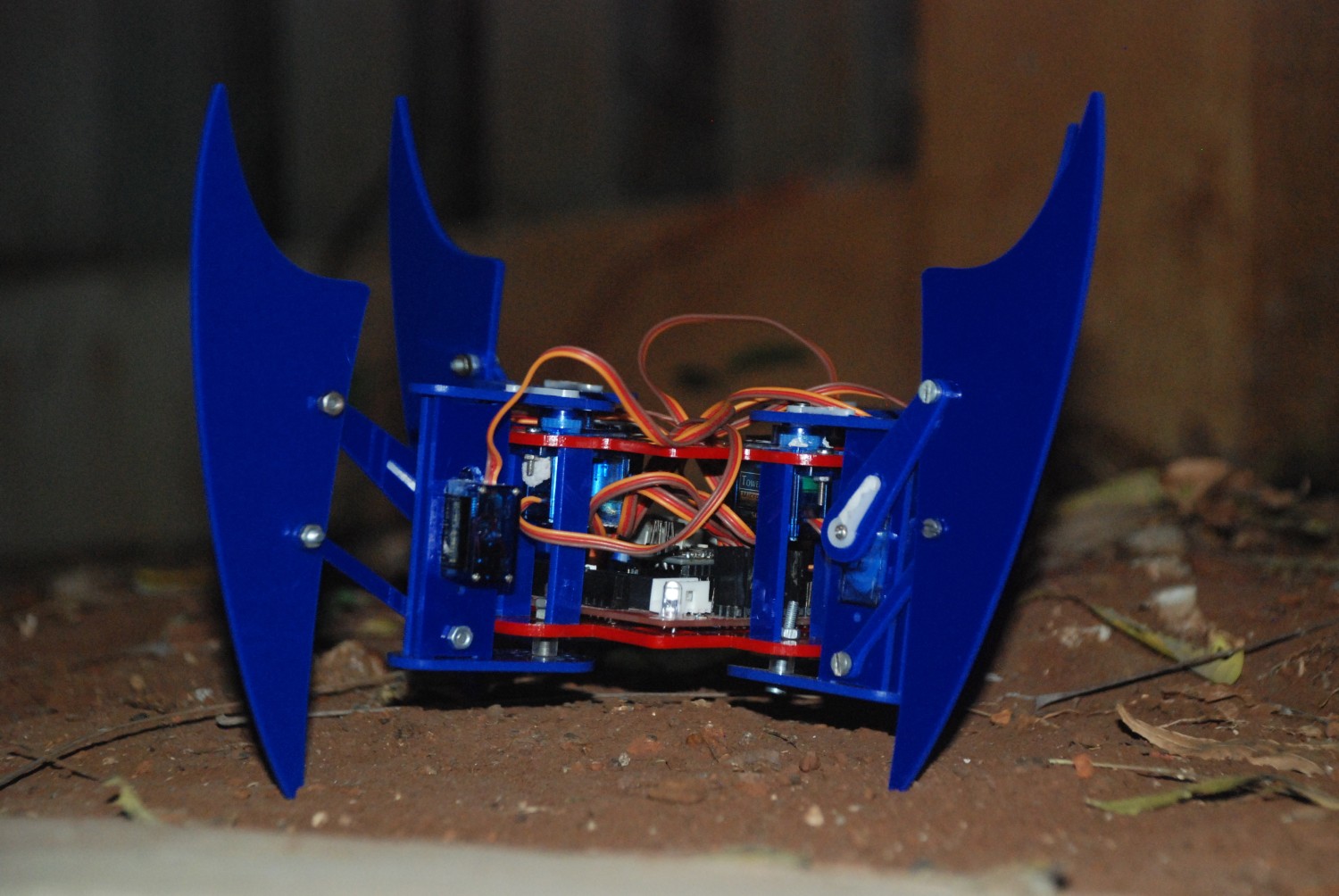
Miles adalah robot laba-laba berbasis Arduino Nano yang menggunakan 4 kaki untuk berjalan dan bermanuver. 8 motor servo SG90 / MG90 digunakan sebagai penggerak kaki. Papan yang dibuat khusus memungkinkan Anda untuk mengontrol dan memberi daya pada motor dan Arduino Nano. Papan memiliki slot khusus untuk modul IMU, Bluetooth dan sensor inframerah, yang memberikan otonomi robot. Bodinya dirangkai dari potongan kaca plexiglass setebal 2 mm pada pemotong laser, tetapi juga dapat dicetak pada printer 3D. Proyek luar biasa untuk para penggemar yang belajar tentang kinematika terbalik dalam robotika.
Terinspirasi oleh proyek mePed (www.meped.io), dan menggunakan kode berdasarkan itu.


Bahan
Komponen:
- Biaya (1)
- Komponen Miles untuk perakitan bodi.
- SG90 / MG90 Motor Servo (12)
- Aduino Nano (1)
- Pengatur tegangan LM7805 (6)
- Sakelar (1)
- Kapasitor elektrolitik 0.33uF (2)
- Kapasitor elektrolitik 0.1uF (1)
- 3.08mm 2 pin konektor Phoenix (1)
- Konektor pria untuk servomotors.
Pilihan:
- Konektor 2 pin Relimate (1)
- Konektor 10 pin Relimate (1)
- Konektor 4 dalam Relimate (1)
Langkah 1: Skema dan

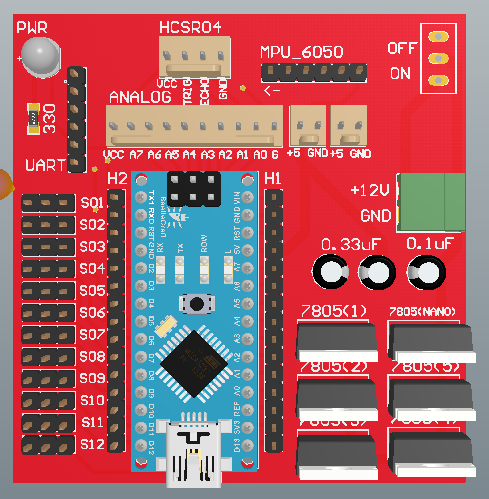

Desain Papan Saya mendesain papan saya di Altium . 12 Motor servo SG90 / MG90 dapat menarik hingga 4-5A saat berjalan secara bersamaan, sehingga rangkaian harus dapat menangani arus tinggi. Saya menggunakan 7805 regulator tegangan untuk menyalakan motor, namun masing-masing dapat menghasilkan maksimum 1 A. Jadi saya menghubungkan 6 LM7805 secara paralel, meningkatkan arus keluaran yang tersedia.
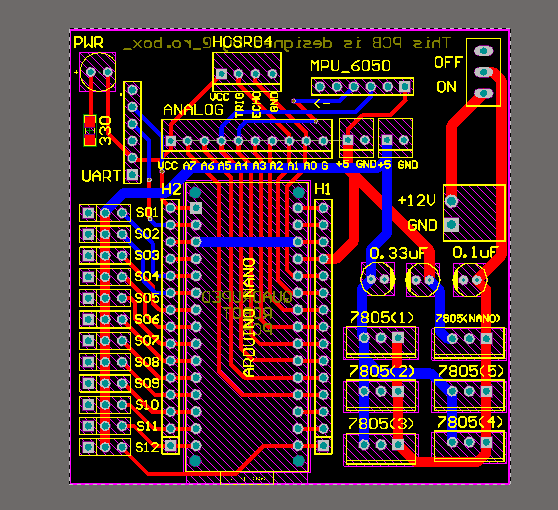
Unduh skema dan file Gerber dari tautan .
Fitur skema:
- MPU6050 / 9250 digunakan untuk mengukur sudut.
- Arus keluaran hingga 6 A.
- Catu daya terisolasi untuk servomotors.
- Output untuk sensor ultrasonik HCsr04.
- Ada periferal untuk Bluetooth dan I2C /
- Relimate memiliki semua kontak analog untuk sensor dan aktuator.
- Keluaran dari 12 motor servo.
- Indikator LED.
Fitur papan:
- 77 × 94 mm.
- 2 lapisan FR4.
- 1,6 mm.
Langkah 2: Menyolder komponen dan memuat kode

Komponen solder saat mereka tumbuh dan mulai dengan perangkat pemasangan di permukaan.
Di sirkuit saya hanya ada satu resistor TMP. Tambahkan pin wanita ke Arduino dan LM7805 sehingga dapat diubah sesuai kebutuhan. Solder pin jantan ke konektor motor.
Sirkuit ini menggunakan suplai 5V, terpisah untuk motor dan Arduino. Periksa ground short pada semua rel daya - keluaran Arduino 5V, keluaran motor VCC, dan masukan 12V Phoenix.
Setelah memeriksa papan, Anda dapat memprogram Arduino. Saya memposting kode tes di Github . Isi dan rakit robot.
Langkah 3: merakit casing

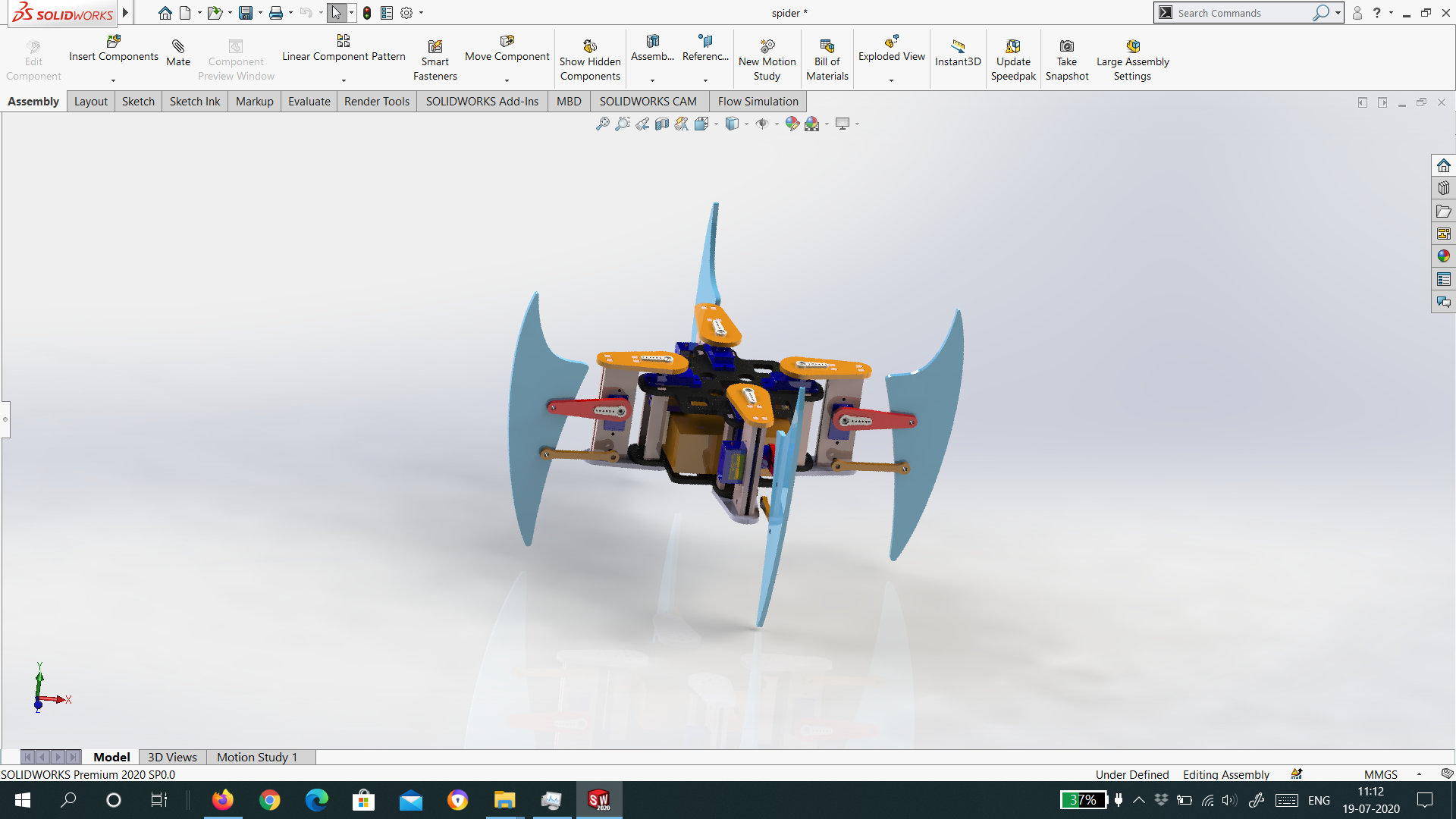
Total robot terdiri dari 26 bagian, yang dapat dicetak pada printer 3D atau dipotong dari kaca plexiglass 2 mm. Saya menggunakan lembaran plexiglass 2mm merah dan biru untuk membuat robot terlihat seperti Spiderman.
Ada beberapa sambungan di bodi yang bisa diamankan menggunakan baut dan mur M2 dan M3. Motor servo dipasang dengan baut M2. Pasang baterai dan papan sebelum memasang penutup.
Saya mengunggah file yang diperlukan ke Github .
Langkah 4: Hubungkan dan uji
Hubungkan dengan urutan berikut:
- Motor putar kiri depan.
- Motor angkat kiri depan.
- Motor ayun kiri belakang.
- Motor angkat kiri belakang.
- Motor putar kanan belakang.
- Motor angkat kanan belakang.
- Motor ayun kanan depan.
- Motor angkat kanan depan.
Mulai robot dengan menggeser sakelar.
Langkah 5: Perbaikan di Masa Depan
Kinematika terbalik
Kode saat ini menggunakan pendekatan posisi - kami mengatur sudut yang harus diputar motor untuk melakukan gerakan tertentu. Kinematika terbalik akan membuat robot berjalan lebih canggih.
Kontrol Bluetooth
Konektor UART di papan memungkinkan Anda untuk menghubungkan modul Bluetooth, misalnya, HC-05, untuk mengontrol robot secara nirkabel dari smartphone.