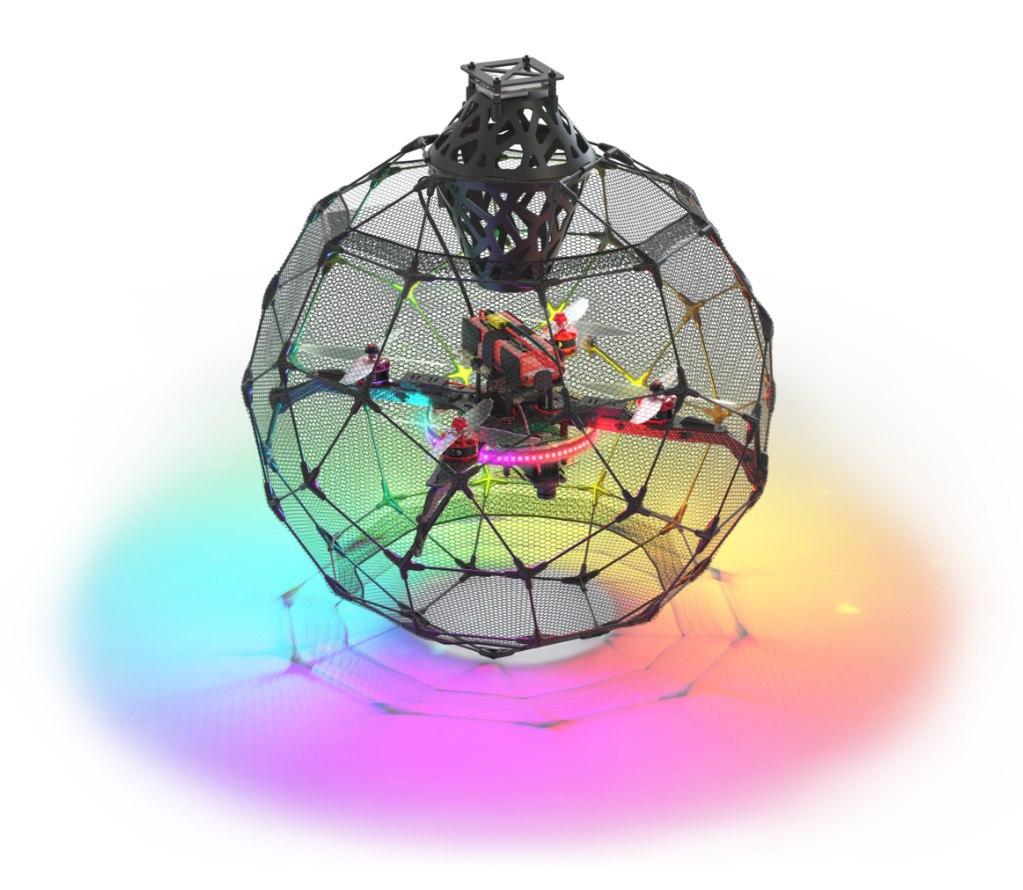
Sangat kontroversial, sangat tidak biasa, sangat aneh, tetapi berhasil! Di persimpangan arsitektur, robotika kolaboratif dan kendaraan udara tak berawak. Memperkenalkan: Tensodrone ™.

Tensodrone (Tensodron) - kendaraan udara tak berawak (UAV) tipe multi-rotor dengan desain baru dengan perlindungan terhadap tabrakan, dibuat berdasarkan prinsip tensegrity. Pendekatan ini meningkatkan ketahanan benturan dengan bobot yang lebih ringan dengan menggabungkan sangkar pelindung dengan desain rangka struktural.
Proyek ini adalah contoh nyata dari interaksi berbagai tim dari Pusat Kompetensi NTI ke arah "Teknologi Komponen Robotika dan Mekatronika" berdasarkan Universitas Innopolis.
Drone jatuh

Sumber
Hanya karena mereka terbang. Sistem kontrol, motor, sensor, pilot otomatis, komputer terpasang, dan perangkat lunak - pengembang mencoba melakukan semua ini seandal mungkin, tetapi risiko menabrak helikopter tetap ada. Dan jika ini adalah prototipe, maka Anda perlu segera membuat beberapa (potongan atau lusinan?) Untuk debugging. Selain faktor internal, tentunya faktor eksternal tetap ada: angin, hambatan pasif, pengaruh aktif.
Hampir tidak ada yang akan membantah, drone jatuh, bertabrakan, terbalik.
Anda dapat mencoba menghindari ini, Anda dapat mempersiapkannya. Apa yang lebih baik? Terserah pengembang, pengguna, dan legislator.
Saya mendukung penggunaan kedua pendekatan secara bersamaan. Namun pada artikel ini, kami akan fokus pada bagaimana menghindari konsekuensi jatuh atau tabrakan sebuah UAV.
Struktur pelindung
Pendekatan paling mudah untuk menghindari konsekuensi jatuh atau tabrakan UAV adalah kandang pelindung dan struktur pelindung lainnya. Ada dua tugas di sini - melindungi drone dari kerusakan dan melindungi lingkungan tempat drone beroperasi dan orang-orang di dalamnya dari drone.
Versi dasar desain, yang lebih mungkin melindungi orang dari drone, adalah pelindung baling-baling.

Drone AR.Drone 2.0 dengan pelindung baling-baling. Sumber
Ada juga solusi menyenangkan yang terinspirasi origami dengan pelindung baling-baling fleksibel yang dapat dilipat (dan bahkan desain rangka) yang dikembangkan oleh tim Profesor Dario Floreano di EPFL.
Desain yang berlaku untuk melindungi drone itu sendiri (dan pada saat yang sama orang-orang darinya) adalah sangkar pelindung. Quadcopter itu sendiri ada di dalam kandang.
DengungSemanggi dari COEX
Rusia Perusahaan Rusia COEX membuat drone untuk tujuan pelatihan, yang secara default memiliki pelindung baling-baling dan, secara opsional, kandang pelindung.
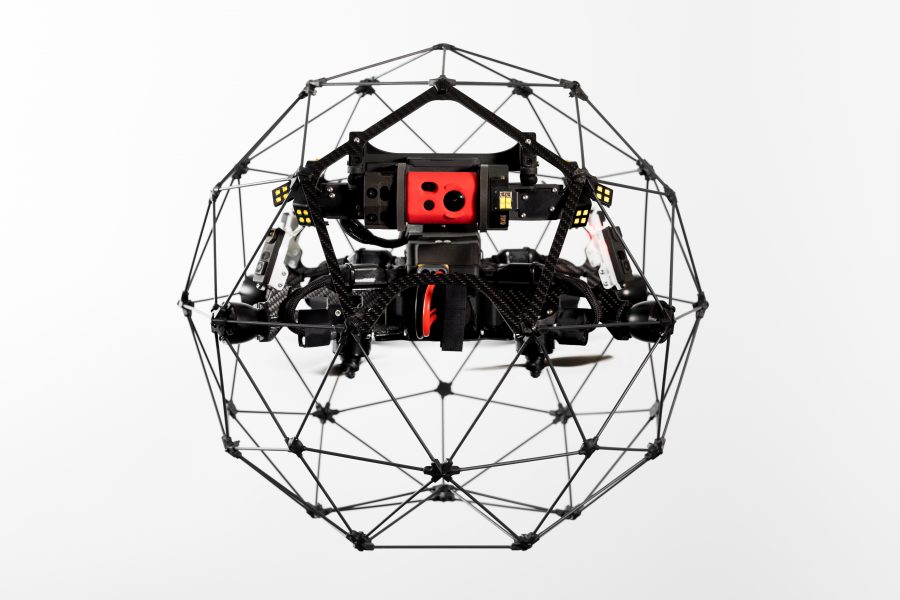
Drone flyability ELIOS
Swiss (Swiss -? Dronostroeniya modal) perusahaan flyability - menghasilkan mungkin yang paling ELIOS copter sukses secara komersial dengan sangkar pelindung untuk melakukan inspeksi di dalam bangunan. Keaslian desain terdiri dari pemasangan sangkar pelindung ke rangka helikopter pada suspensi yang dapat digerakkan dengan kemungkinan stabilisasi.

Drone Dronistics Startup Dronistics
EPFL (lagi-lagi Swiss, dari grup Dario Floreano) menawarkan drone dengan sangkar lipat untuk pengiriman barang yang aman.
Masih istirahat

Kerugian dari drone semacam itu adalah peningkatan massa struktur - Anda harus membawa sangkar pelindung dan lampiran ke UAV. Keinginan untuk mengurangi berat struktur pelindung menyebabkan penurunan kekuatannya.
Drone dengan geometri variabel
Arah lain yang terkait dengan gagasan drone yang kokoh (dan tidak hanya) adalah drone lipat dan drone dengan geometri variabel (dapat dilipat dan morphing). Ini mengacu pada kemampuan drone untuk mengubah geometrinya dalam penerbangan. Struktur lipat dibuat untuk menghindari kerusakan pada drone (misalnya, drone dapat "ngeri" sebelum benturan), dan drone dapat, misalnya, dilipat menjadi ukuran yang kompak untuk terbang melalui jendela sempit.
Anda mungkin pernah melihat video drone geometri variabel keren dari Swiss (ya, ETH + EPFL + UZH lagi). Ide ini juga menarik dan dekat dengan kami, saya akan beri tahu alasannya nanti.
Drone dengan geometri variabel
Tensegritas
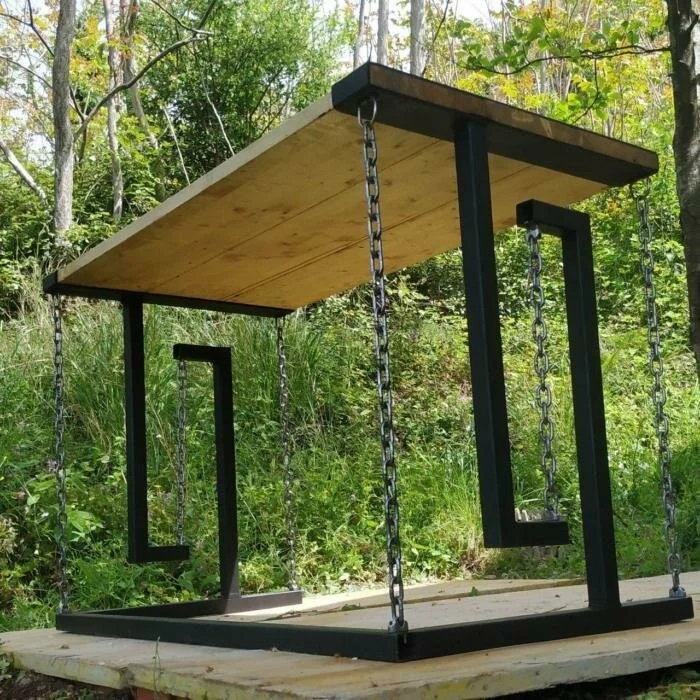
Tabel tensegritas. Sumber
Tensegritas adalah kemampuan struktur framing untuk memanfaatkan interaksi elemen padat tekan dengan komposit tarik untuk memastikan bahwa setiap elemen beroperasi dengan efisiensi dan ekonomi maksimum ( Wiki ). Istilah ini relatif baru, muncul tahun 1960-an. Tabel pada gambar di atas berdiri (atau menggantung) tanpa kaki justru karena prinsip tensegrity.
Ada banyak aplikasi modern dari pendekatan ini dalam arsitektur, darimana pendekatan ini muncul, terutama dalam desain jembatan.

Jembatan Tensegrity terbesar di dunia, Australia. Sumber
Penggunaan alternatif :)
Tensegritas dalam robotika
Salah satu bidang robotika tertua - manipulator industri - kini mengalami tahap baru dalam perkembangannya, terkait dengan apa yang disebut. robotika kolaboratif. Dalam pidato spesialis di bidang ini, dua istilah dapat didengar dengan frekuensi yang tinggi - kekakuan dan kepatuhan.
Dalam robotika industri, istilah kepatuhan mengacu pada fleksibilitas dan kepatuhan. Robot yang kaku dan tidak patuh adalah perangkat yang bekerja tidak peduli gaya eksternal apa pun yang bekerja padanya. Efektor akhir robot akan mengikuti jalur yang persis sama setiap saat. Di sisi lain, end-effector dari robot yang patuh dapat bergerak di sepanjang lintasan yang berbeda untuk menyelesaikan tugas dan menerapkan gaya yang berbeda pada objek. Misalnya, robot bisa mengambil telur tanpa menghancurkannya. Kekakuan yang terkontrol adalah inti dari robotika kolaboratif.
Ide untuk menggunakan tensegrity dalam robotika berasal dari kolaborasi dan robotika "lunak". Struktur tensegritas ringan, tahan benturan dan memungkinkan untuk mengontrol kekakuan (kesesuaian) dan konfigurasi (bentuk).
Contoh paling terkenal dari penerapan tensegritas dalam robotika adalah Super Ball Bot milik NASA, robot tanah yang dapat dilipat, yang rencananya akan digunakan untuk mempelajari permukaan planet. Berkat struktur bola dan tali yang berbentuk bola, robot ini dapat menahan jatuh dari ketinggian saat dijatuhkan ke planet dari pesawat luar angkasa. Begitu berada di permukaan, robot dapat menggelinding ke segala arah dengan mengontrol panjang kabel dan / atau batang.
Video Spektrum IEEE di NASA SUPERball v2
Robot tarik-menarik di Universitas Innopolis
Di UI, kami mengembangkan peralatan matematika untuk pemodelan, perancangan dan pengendalian sistem robotik dengan struktur yang dipasangkan dengan tegangan dengan kekakuan variabel (ini adalah Tensegrity). Ini adalah pekerjaan mendasar yang dapat ditemukan di berbagai macam robot, seperti manipulator tensegritas atau robot berjalan.
Manipulator tensegritas dan peneliti lulusan UI Oleg Balakhnov
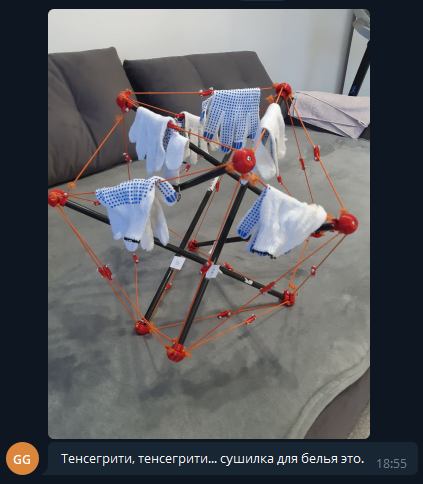
Oleg adalah orang pertama yang memulai prototipe robot tensegritas di sini - pertama dari tongkat kayu dan karet gelang. Foto pembuatan stik sushi, mungkin, juga menyimpan sejarah obrolan.
Tensegrity Vibrobot
-
-
Efek sinergis

Anda mungkin sudah mendapatkannya
Saya memiliki drone, saya memiliki ketegangan. Ugh! (Tensodrone)
Begitu sampai di garasi kami, saya melewati desain aneh yang menarik perhatian:
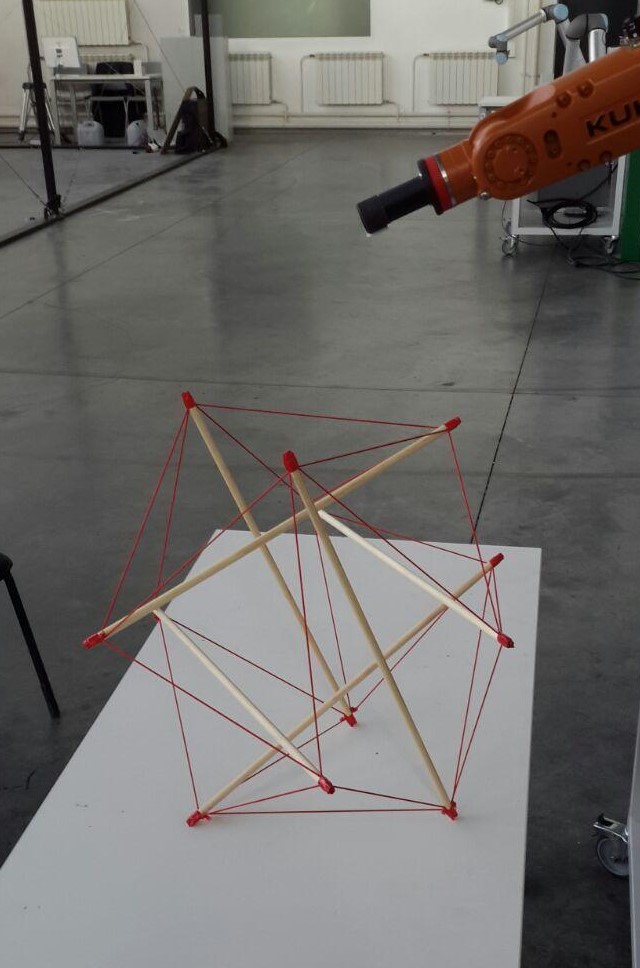
Saya bertanya: "Apa ini?" Saya diberitahu: "sebuah struktur yang tidak bisa dibunuh - jatuhkan, tapi tidak pecah."
Saya putus (sebenarnya baru saja mengkerut - berubah bentuk karena karet gelang kendor dan tidak sejajar). Tapi kami membutuhkan desain seperti itu untuk drone! Dan kami memulai eksperimen petualangan.
Video Uji Bertahan Hidup Tensegrity
Tes yang lebih ketat
Squishy robotics — , - , ,
Squishy robotics — , - , ,
Petualangan

Sergey menyetujui eksperimen petualangan itu. Jeff Bezos juga
Sergey Savin - peneliti senior, profesor madya, ilmuwan serius dengan gelar Ph.D. pada usia 25 tahun dan banyak publikasi rating. Ia adalah salah satu pendiri Tensegrity Robotics di UI, dan telah menerima beberapa hibah untuk pengembangan Tensegrity in Robotics.
Igor sedang mempertimbangkan sebuah ide
Dmitry, Oleg, dan Haney mengumpulkan tencodron pertama (sepertinya sesuatu). Dmitry DevittGigaFlopsis- seorang peneliti dan mahasiswa pascasarjana Universitas dan yang menerapkan teknologi paling modern - tabung karbon dan benang kevlar, pencetakan 3D dengan karbon dan plastik lembut, menerapkan semuanya dan membuatnya terbang.

Proses perakitan tensodron

Ura. terjadi!
Lalat!
Dmitry juga aktor pertama setelah tensodron dalam video epik penerbangannya. Menilai:
Permainan dua aktor yang dibintangi sendiri. Video oleh DeluuusiOn
Lebih lanjut tentang konstruksi prototipe
Desain prototipe drone pertama ternyata sebagai berikut:
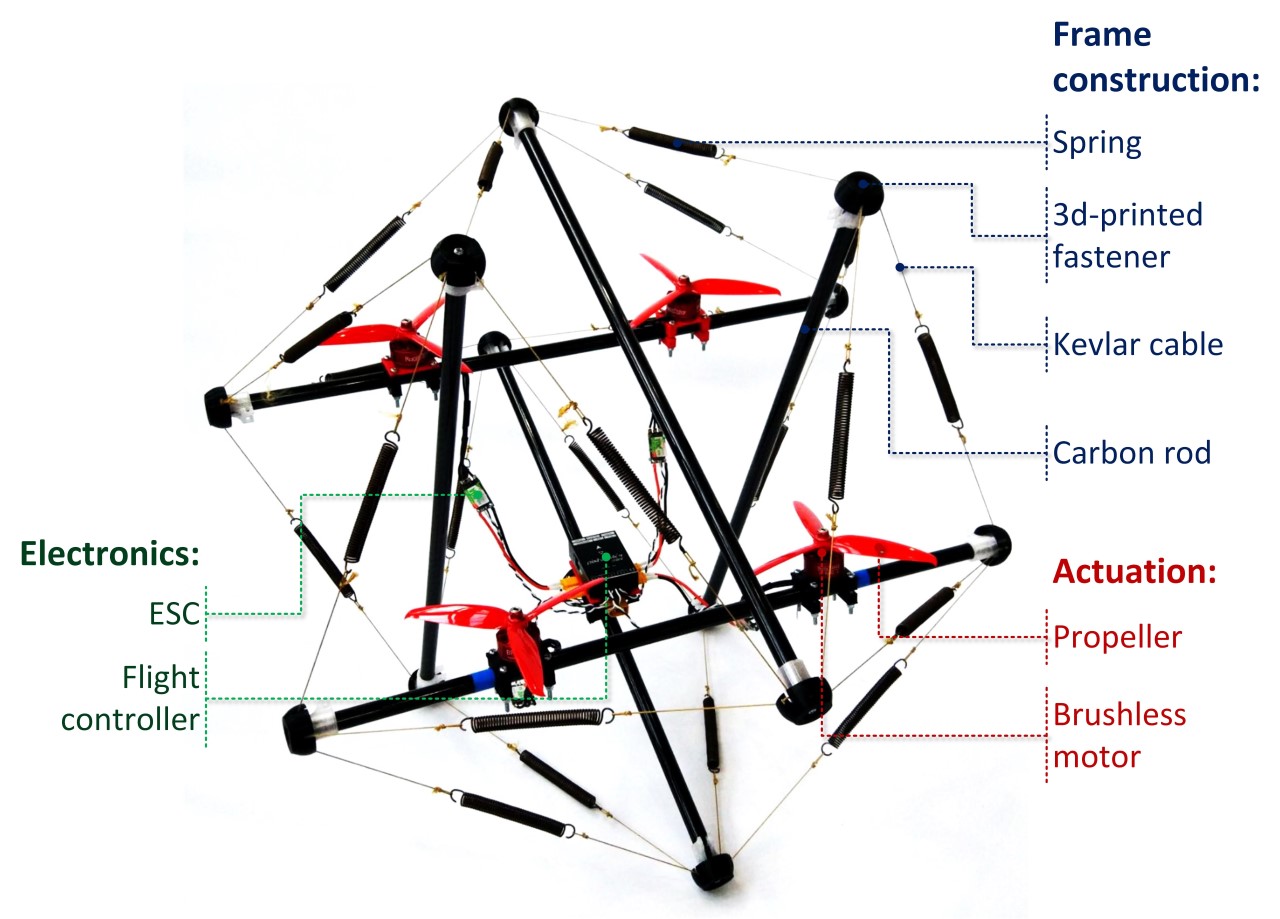
Desain prototipe tensodron Universitas Innopolis
Desain enam batang dasar Tensegrity digunakan. Tidak seperti quadcopter kaku, kami memiliki dua pasang motor baling-baling yang dipasang pada balok yang berbeda. Juga, tidak ada satupun dari mereka yang terhubung secara kaku ke autopilot, yang terletak di balok bawah.
Komponen elektronik dan elektromekanis onboard dari prototipe drone meliputi:
- Autopilot CUAV Pixhawk v5 mini;
- Baterai 3s 1400mAh;
- Pengatur ESC Racerstar REV35 35A BLheliS 3-6S;
- Motor Racerstar Racing Edition BR2205 2300KV;
- Sensor IMU MPU9250.
Kabel terbuat dari serat Kevlar dengan pegas khusus. Batangnya terbuat dari tabung serat karbon. Tutup ujung dan bagian kecil lainnya dicetak 3D.
Masalah manajemen
Masalah kontrol utama dibandingkan dengan drone keras konvensional adalah getaran, yang pertama, amplitudonya lebih besar, dan kedua, berbeda untuk pengontrol dan mesin yang berbeda, karena mereka dipasang pada balok yang berbeda (meskipun ini juga bisa menjadi plus - isolasi getaran).
Tes Tensodron Gimbal Awal: Getaran (maaf untuk video vertikal)
Tes awal tensodron dalam penerbangan: getaran
Kita tidak sendirian
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
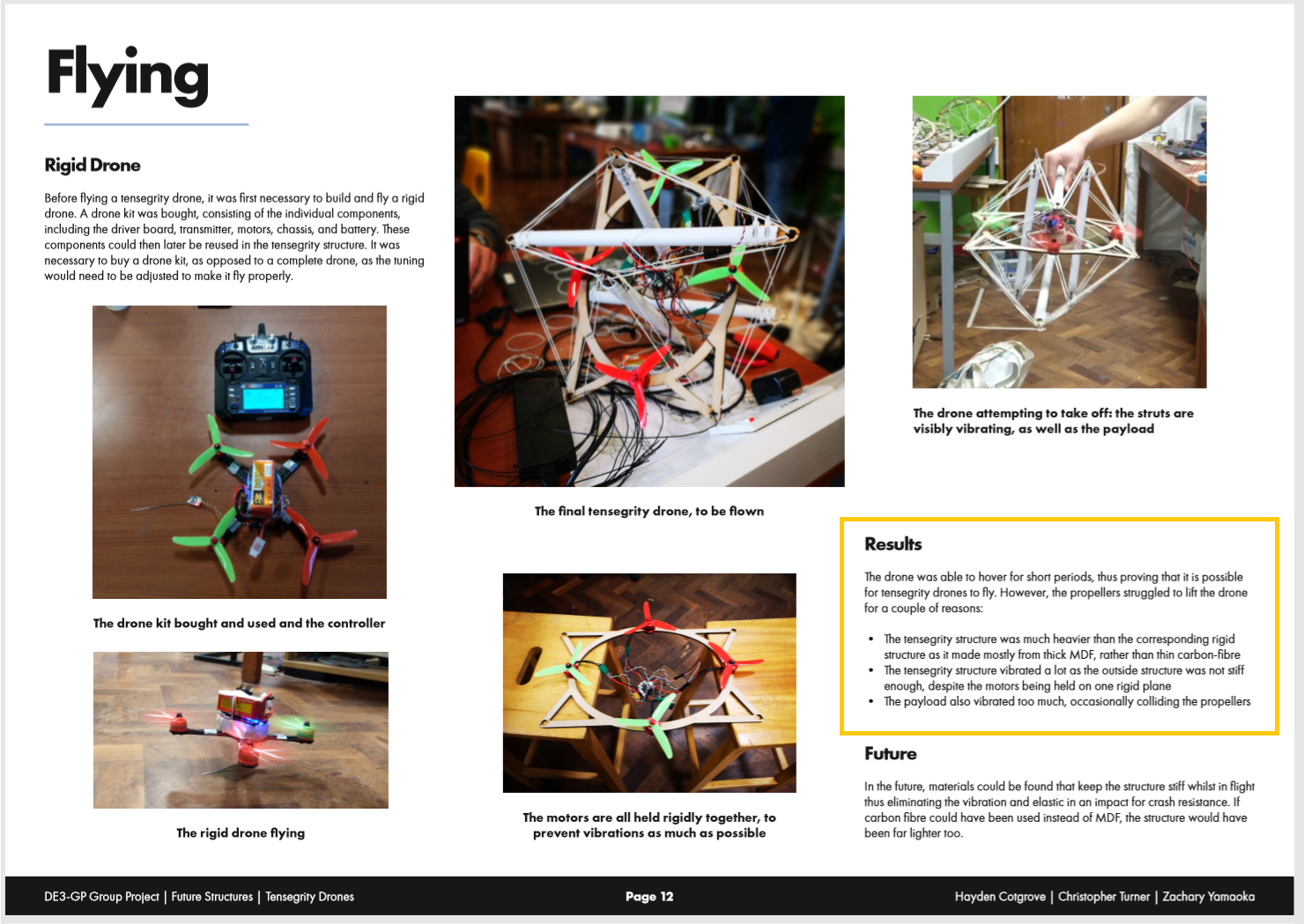
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
Kami menyelesaikan masalah ini dari dua sisi - dengan meningkatkan desain untuk mengurangi getaran selama penerbangan dan mengembangkan algoritme kontrol dan estimasi status untuk menekan getaran dan kontrol yang lebih baik, termasuk dengan mempertimbangkan data tambahan dari sensor IMU pada balok dan model dinamis dari struktur tensegritas.
Jatuh ke lantai diikuti lepas landas, di dalam ruangan (tanpa pemasangan)
Beberapa video uji lagi
, , . , .. .
( )
( )
Apa berikutnya?
Penelitian
Masih banyak hal menarik ke depan:
Aplikasi
Sekarang benda ini terbang dengan sendirinya pada misi tertentu (termasuk GPS di jalan, dan di dalam ruangan - kami akan menggunakan odometri visual). Bagi kami, aplikasi lebih lanjut untuk pemeriksaan tempat sudah jelas.
Kecuali untuk kontrol dan bentuk tingkat rendah, tensodron adalah drone biasa, kami mengintegrasikan algoritme perencanaan gerakan kami ke dalamnya untuk eksplorasi otonom dan penghindaran rintangan.
Contoh melakukan inspeksi otomatis. Proyek Guru oleh Victor Massague, alumni kami dan dalam waktu dekat, semoga seorang karyawan dari Barcelona
Dan lagi penelitian
Potensi desain drone Tensegrity jauh lebih besar daripada drone sederhana.
Ingat Drone Lipat dari video di atas? Bagaimana dengan SUPERball ?
Jadi, jika Anda secara aktif mengubah panjang batang atau tegangan kabel drone tensegrity, Anda dapat mengontrol konfigurasinya (atau, lebih sederhananya, bentuknya)!
Ternyata Tensodrone Morphing Lipat. Kami secara aktif melakukan penelitian di bidang ini.
Innopolis University Variable Geometry Tensodron (Konsep)

Penerapan Tensegritas untuk sebuah pesawat membuka tantangan penelitian baru. Prototipe desain sudah menunjukkan bahwa idenya berhasil dan dapat digunakan untuk melindungi UAV.