
Evolusi telah memberi kita banyak hewan yang tidak biasa. Beberapa dari mereka sangat tidak biasa sehingga penemunya disebut penjahat (seperti yang terjadi pada platipus pada 1797). Tetapi tidak hanya fauna yang dapat membanggakan spesies non-standar, di antara perwakilan flora ada juga gagak putih, yaitu tanaman yang tidak ingin duduk dengan makanan yang cerah, tetapi lebih memilih serangga berair dan hewan kecil lainnya sebagai hidangan hari ini. Sebelumnya, kita telah mengetahui sebuah penelitian di mana para ilmuwan meneliti tumbuhan insektivora Venus dan duri pinggirnya.... Hari ini kita harus mencari tahu seberapa sensitif duri ini. Ilmuwan dari Universitas Zurich (Swiss) melakukan serangkaian percobaan praktis, yang bertujuan untuk mengukur kecepatan reaksi penangkap lalat venus terhadap sentuhan gaya tertentu. Bagaimana tepatnya para ilmuwan "menggelitik" flycatcher, seberapa cepat reaksinya, dan bagaimana hasil ini menjelaskan preferensi gastronomi tanaman predator? Kami akan menemukan jawaban atas pertanyaan-pertanyaan ini dalam laporan para ilmuwan. Pergilah.
Dasar penelitian
Agar narasi ini tidak meluas, deskripsi penangkap lalat Venus (yang telah digunakan di artikel sebelumnya) disembunyikan di bawah spoiler:
Apa itu flycatcher?
, . , . — , . , «» (, ) ( , ). 630 , , .
: . ( ), — , .

. , — ( 300 000 1 ) , . , , . , . , .
, «».
, . : , , . , , . , , , . -, . .

: , - .
, -, . . , . , . , . , ? , . 2 20 . , , . , , , , .
. , . , , . , ( ), , . . , , . — , . , . , 2-3 .
. , , . , , . , .
True Facts: Carnivorous Plants ( : ). .
, -. , , .
, , , , « ». , , «». , , , , . , . , .
: . ( ), — , .
. , — ( 300 000 1 ) , . , , . , . , .
, «».
, . : , , . , , . , , , . -, . .
: , - .
, -, . . , . , . , . , ? , . 2 20 . , , . , , , , .
. , . , , . , ( ), , . . , , . — , . , . , 2-3 .
. , , . , , . , .
True Facts: Carnivorous Plants ( : ). .
, -. , , .
, , , , « ». , , «». , , , , . , . , .
Gagasan utama dari mekanisme pemicu perangkap penangkap lalat venus adalah mangsa masa depan perlu melakukan dua sentuhan pada rambut sensitif tanaman dalam waktu 30 detik. Setiap sentuhannya menghasilkan potensi aksi * yang diperlukan untuk menutup jebakan. Para ilmuwan telah mempercayai hal ini selama 200 tahun, tetapi apakah teorinya konsisten dengan praktik?
Selama bertahun-tahun penelitian, para ilmuwan telah mengembangkan skenario peristiwa yang seharusnya (secara teori) terungkap selama perburuan penangkap lalat:
- tanaman yang lapar menarik serangga dengan mengeluarkan senyawa yang mudah menguap;
- serangga yang tidak terlalu cerdas menjelajahi tanaman (mengharapkan makanan gratis), di mana ia menyentuh salah satu dari enam rambut sensitif, sehingga menyebabkan potensi aksi (AP dari potensi aksi);
- 30 , «It’s a trap!», , ;
- (, ), (C12H18O3) .
Akibatnya, "kelopak" lalat yang sebelumnya terbuka berubah menjadi semacam perut, di mana mangsa yang tidak berhasil akan dicerna.
Dalam pekerjaan ini, para ilmuwan memutuskan untuk mempertimbangkan secara rinci proses pengubahan stimulasi mekanis pada rambut sensitif menjadi sinyal listrik. Kami tahu pasti bahwa menyentuh rambut sensitif membuka saluran ion sensitif mekanis, tetapi kami belum dapat mengidentifikasi saluran ini.
Sementara saluran putatif ini terbuka, potensi reseptor * (RP dari potensi reseptor ) meningkat, dan jika defleksi rambut cukup besar, RP mencapai ambang di atas mana AP dimanifestasikan.
* — , .
* — , .
* — .
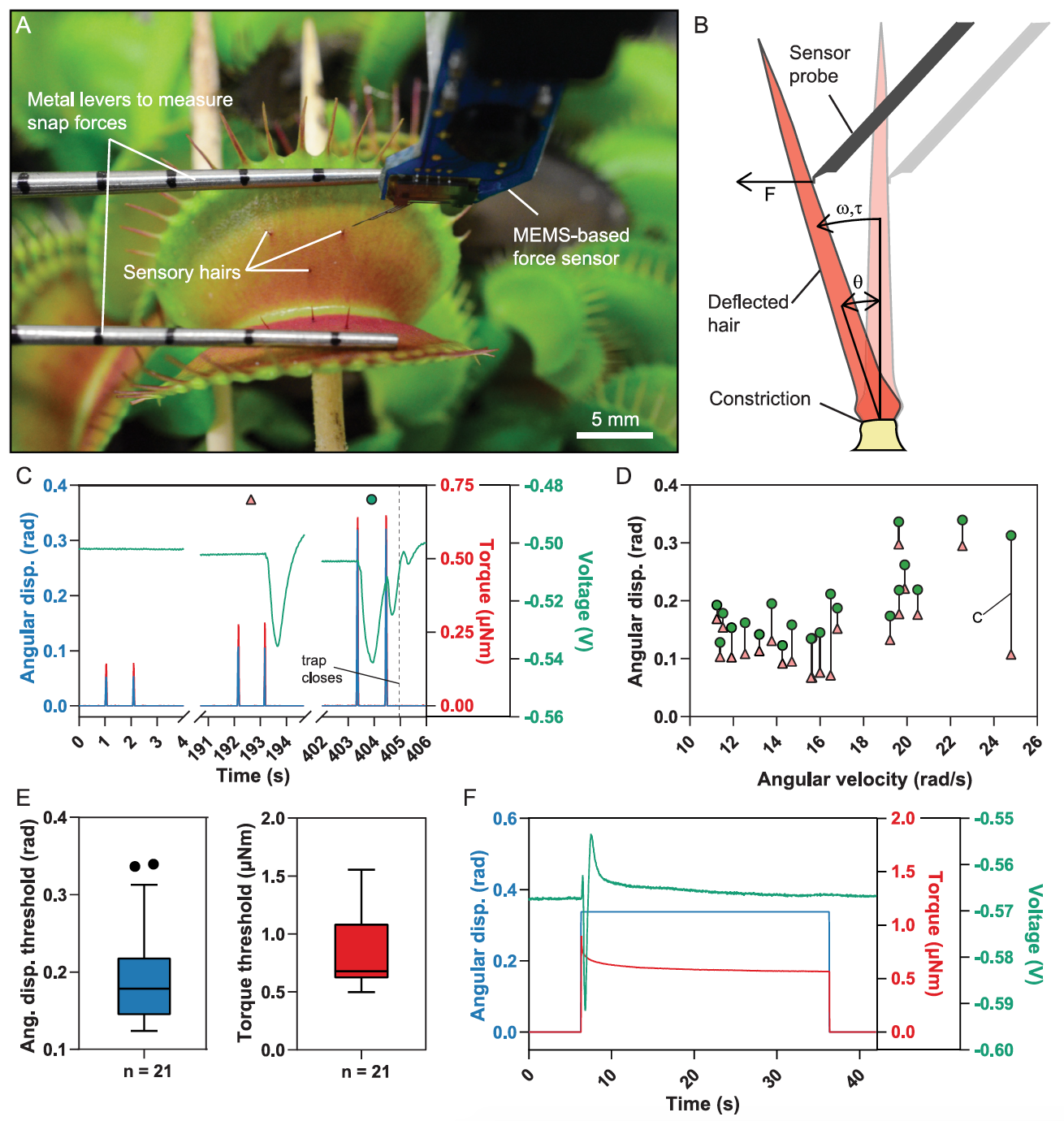
Image # 1
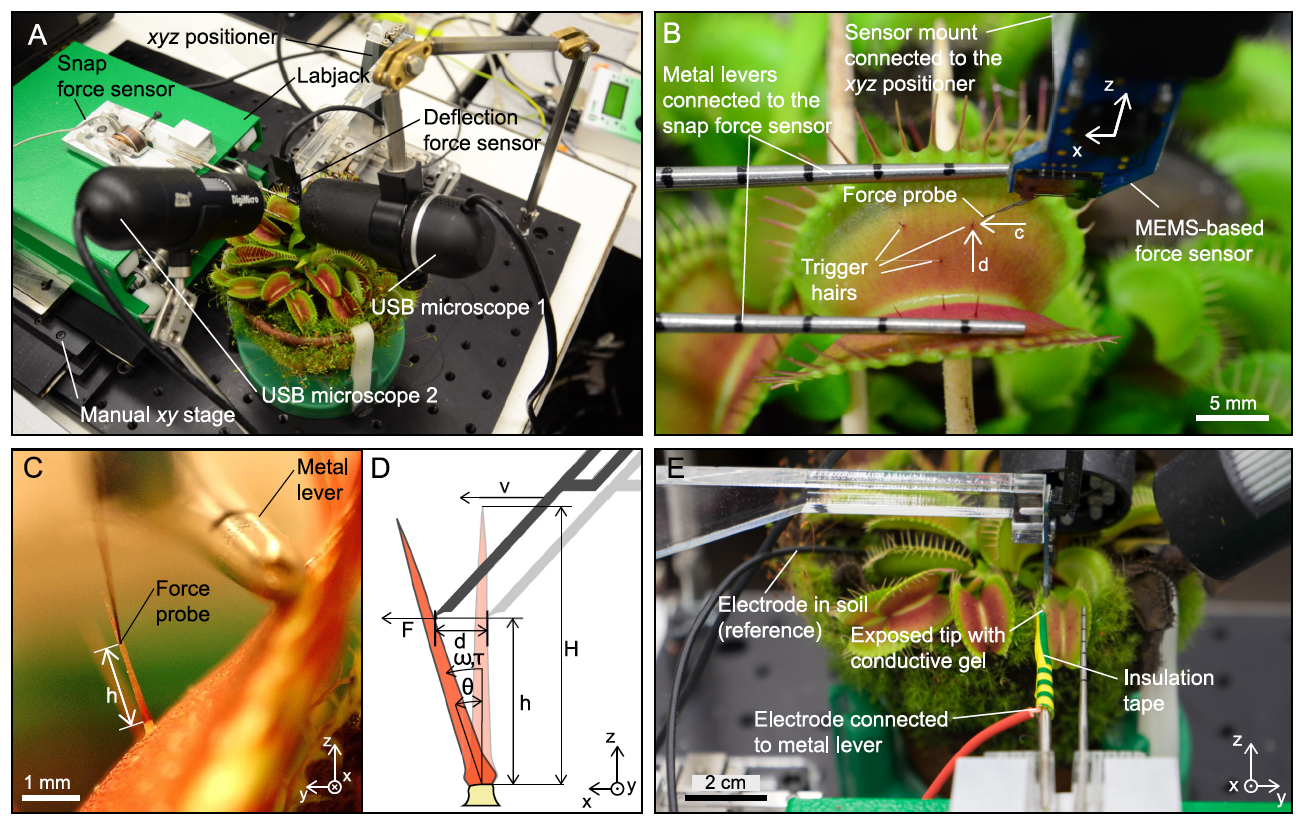
Ada upaya sebelumnya untuk menghubungkan rangsangan mekanis dan tindakan potensial generasi, tetapi tidak ada instrumen yang cocok untuk pengukuran yang akurat. Dalam kasus studi yang kami ulas hari ini, para peneliti menggunakan sensor gaya berbasis MEMS * yang dipasang pada sistem mikrorobotik untuk secara akurat mengontrol kecepatan dan amplitudo defleksi, dan secara bersamaan mengukur gaya yang diterapkan ( 1A dan 1B ).
MEMS * (sistem mikroelektromekanis) adalah perangkat yang menggabungkan komponen mikroelektronika dan mikromekanis.
Gambar # 2
Dengan demikian, para ilmuwan dapat secara akurat menentukan kisaran parameter di mana defleksi rambut mengarah ke penutupan jebakan, sedangkan sensor gaya kedua mengukur gaya sesaat yang dihasilkan (gambar di atas).
Hasil penelitian
Selama percobaan, para ilmuwan memperhitungkan bahwa laba-laba, lalat, dan semut (mangsa umum bagi penangkap lalat) akan menyebabkan rambut sensitif untuk menangkis dengan cepat. Akibatnya, sistem mikrorobotik digunakan dengan kecepatan penuh untuk meniru rangsangan ini. Ini menghasilkan kecepatan sudut awal yang tinggi dalam kisaran 10 hingga 20 rad / s.
Penelitian sebelumnya menemukan bahwa semut membelokkan rambut sensitif dengan kecepatan sudut 0,25 - 7,8 rad / s, tetapi lebih lambat daripada lalat. Oleh karena itu, parameter yang digunakan lebih tinggi dari yang sebenarnya, yang sangat sesuai untuk menilai kemampuan penangkap lalat Venus.
Pada kecepatan tinggi seperti itu, durasi defleksi secara signifikan lebih pendek daripada faktor bergantung waktu lain yang terlibat, seperti kerusakan RP dan relaksasi rambut sensorik (1F ).
Mempertimbangkan deviasi sudut daripada linier memungkinkan untuk memperbaiki perbedaan ketinggian kontak probe sensorik relatif terhadap tempat penyempitan rambut sensorik, serta perbedaan geometri berbeda dari rambut sensorik ( 1B , 2C dan 2D ). Oleh karena itu, satu defleksi dapat diperkirakan dengan peningkatan diskrit dalam offset sudut, dan pemicuan AP terutama bergantung pada besarnya offset sudut.
Satu defleksi didefinisikan sebagai kombinasi perpindahan sudut ke depan-ke belakang, mirip dengan apa yang terjadi saat mangsa menyentuh rambut. Setiap pengukuran terdiri dari dua defleksi berikutnya dengan interval 1 detik di antara keduanya hingga perpindahan sudut tertentu given. Jika jebakan tidak menutup, fase tunggu (2 menit) diikuti untuk memastikan bahwa RP telah disetel ulang sepenuhnya. Penantian tepat selama dua menit, dan tidak lebih / kurang, disebabkan oleh fakta bahwa rangkaian percobaan sebelumnya menunjukkan bahwa pada suhu di bawah 30 ° C, diperlukan dua defleksi rambut dalam 30-40 detik untuk menutup perangkap dengan cepat dan sempurna.
Setelah tahap menunggu, prosedur diulangi dengan peningkatan perpindahan sudut sampai mekanisme penutupan perangkap terpicu ( 1C dan 1D).). Hal ini terjadi ketika ambang perpindahan rata-rata θ = 0,18 rad atau ambang torsi rata-rata τ = 0,8 μN m (n = 21) tercapai.
Para ilmuwan mencatat bahwa penutupan perangkap tidak pernah dicatat jika θ di bawah 0,12 rad dan τ di bawah 0,50 μN · m ( 1E ). Akibatnya, indikator ini adalah batas bawah deviasi sudut yang diperlukan untuk memicu penutupan trap pada kondisi percobaan ini. Dimungkinkan juga untuk menentukan bahwa agar perangkap beroperasi, serangga harus memberikan gaya (F) 0,5 mN di dekat ujung rambut atau 5 mN di dekat alas.
Pengukuran AP memberikan hubungan antara defleksi rambut sensorik dan penutupan perangkap. Ketika dua deviasi berturut-turut jauh di bawah ambang bias (θ << 0,12 rad), tidak ada AP yang diamati. Untuk amplitudo defleksi dekat ambang perpindahan (θ <0,12 rad), AP tunggal terdeteksi setelah defleksi kedua.
Ini menunjukkan bahwa kedua defleksi rambut berkontribusi pada RP dan ambang induksi AP hanya tercapai pada defleksi kedua. Seperti yang diharapkan, satu AP tidak cukup untuk memicu jebakan.
Asumsi bahwa setiap sentuhan memicu AP hanya valid jika defleksi rambut sensorik melebihi ambang perpindahan. Jika demikian, maka dua AP (satu untuk setiap defleksi rambut) dihasilkan dan menyebabkan jebakan menutup ( 1C ).
Defleksi ganda pada rambut sensitif menghasilkan dua AP dan penutupan jebakan.
Hasil ini menunjukkan bahwa defleksi cepat pada rambut sensitif meningkatkan RP ke tingkat tertentu yang bergantung pada amplitudo defleksi sudut. RP dapat menumpuk dan dapat memanggil AP setelah beberapa defleksi jika mereka berada di bawah ambang defleksi. Namun, pembentukan satu AP per sentuhan hanya terjadi jika defleksi rambut sensitif berada di atas ambang defleksi.
Dengan kata lain, potensi aksi hanya akan dihasilkan bila rambut sensitif sudah cukup “diganggu”. Namun potensi aksi satu tembakan tidak cukup untuk memicu penutupan jebakan. Ini sesuai dengan teori bahwa penerbang tidak akan membuang energi untuk menutup jebakan setiap kali ada sesuatu atau seseorang yang menyentuh rambut mereka. Jika tidak, mungkin ada banyak perangkap kosong tanpa energi (nutrisi) yang kembali (mangsa berhasil melarikan diri, mangsa terlalu kecil, atau sama sekali bukan mangsa, melainkan sampah).
Mengingat bahwa peningkatan RP dengan beberapa deviasi bersifat aditif, akan logis untuk mengasumsikan bahwa perpindahan rambut yang berkelanjutan (jangka panjang) dapat memiliki efek yang serupa.
Untuk menguji hipotesis ini, para ilmuwan menolak rambut sensitif penangkap lalat di luar ambang perpindahan sudut dan menguncinya di posisi itu selama 30 detik ( 1F ). Namun, ini tidak memicu jebakan.
Perpindahan awal menyebabkan AP tunggal, setelah itu ketegangan dengan cepat kembali ke baseline, meskipun rambut tetap dibelokkan.
Jika bias berkelanjutan berkontribusi pada RP, itu harus tetap di atas ambang batas, dalam hal ini seri AP diharapkan. Analisis tambahan telah menunjukkan bahwa misalignment sudut memang memainkan peran penting dalam RP, tetapi defleksi rambut statis tidak berkontribusi sama sekali.
Anehnya, pada percobaan sebelumnya situasinya berbeda: satu perpindahan rambut menyebabkan penutupan jebakan. Namun, ini bukanlah perpindahan tunggal yang tidak terpisahkan, tetapi banyak perpindahan kecil, karena osilasi yang disertai dengan defleksi manual rambut mungkin lebih besar dari ambang perpindahan sudut.
Tahap selanjutnya dari penelitian ini adalah untuk menciptakan sebuah elektromekanis biaya penumpukan (ECB ) Model , yang mengejutkan memprediksi penutupan perangkap dari satu sentuhan.
Berdasarkan data yang diperoleh selama percobaan, para ilmuwan mengembangkan model sederhana untuk mempelajari batas perpindahan sudut dan kecepatan di mana perangkap akan bereaksi.
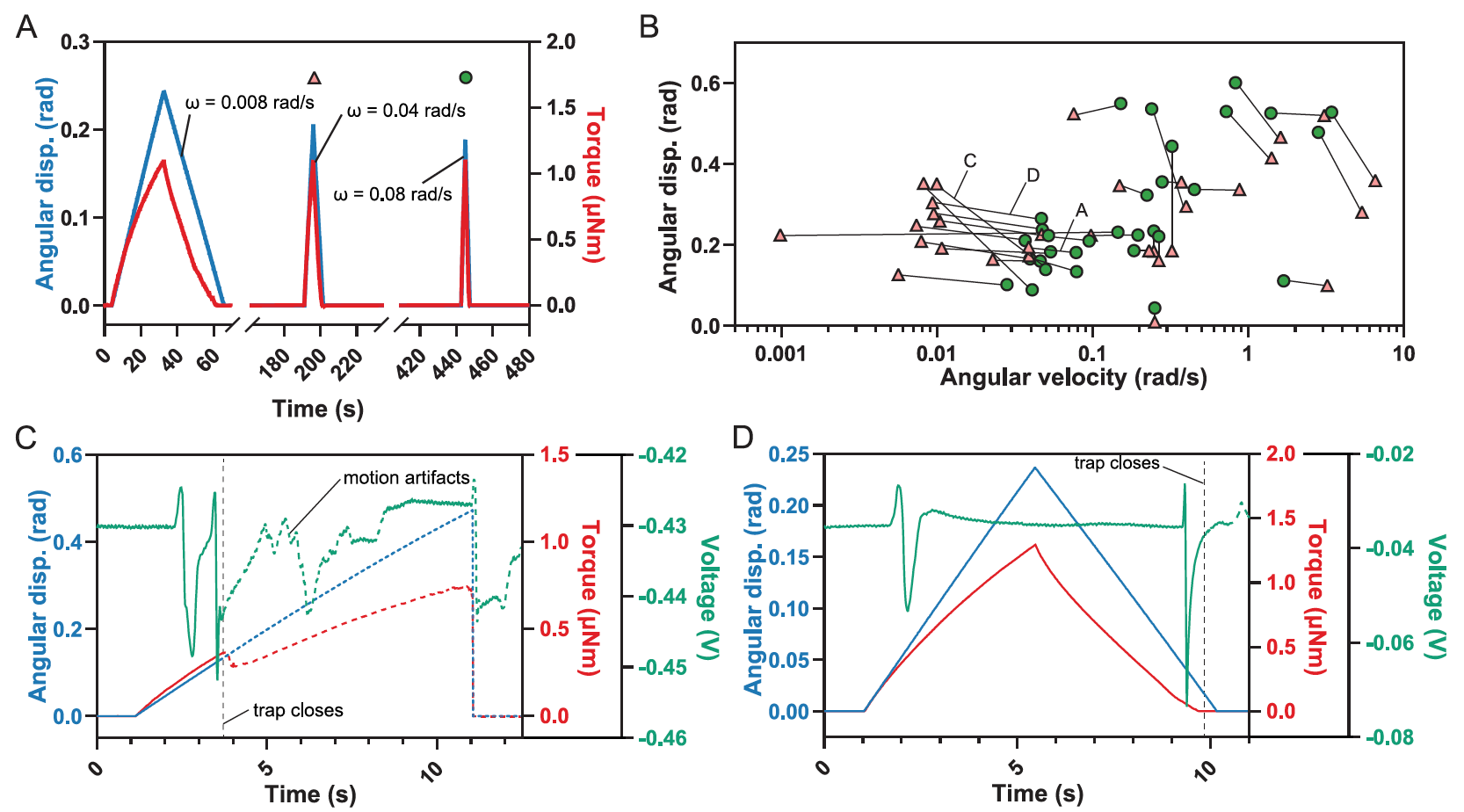
Dalam model ECB, defleksi mekanis menghasilkan akumulasi muatan RP sebagai fungsi dari kecepatan sudut ω dan perpindahan θ, sedangkan muatan terus menerus dihamburkan. Jika akumulasi biaya melebihi ambang batas Q th RP tertentu , terjadi AP. Selain itu, periode refraktori t RP telah diterapkan , mewakili interval waktu yang diperlukan untuk mengaktifkan AP lain.
Hasilnya, model memprediksikan bahwa jika deviasi terlalu cepat dan / atau terlalu kecil, maka diperlukan lebih dari dua deviasi untuk menyebabkan trap menutup (area merah pada 3A ).

Gambar # 3
Hal ini disebabkan fakta bahwa satu defleksi tidak cukup untuk mengaktifkan AP ( 3B), seperti yang ditunjukkan oleh eksperimen praktis ( 1C , tengah).
Demikian pula, model menunjukkan bahwa kecepatan sudut yang sangat rendah (ω <0,04 rad / s) tidak dapat memenuhi RP.
Tetapi hasil simulasi yang paling tidak terduga adalah prediksi kisaran kecepatan sudut menengah (0,04 rad / s <ω <10 rad / s), di mana satu defleksi cukup untuk mengaktifkan dua atau lebih AP, yang diperlukan untuk menutup trap ( 3B ).
Namun, prediksi tersebut bertentangan dengan gagasan tentang cara kerja mekanisme perangkap lalat venus. Oleh karena itu, para ilmuwan memutuskan untuk memeriksa apakah situasi model ini dapat direalisasikan dalam praktik.
Sebuah defleksi tunggal pada rambut sensitif menyebabkan penutupan jebakan.
Anehnya, penutupan perangkap memang terjadi dengan satu defleksi rambut jika kecepatan sudut cukup rendah.
Untuk mempersempit kisaran nilai di mana hal ini terjadi, para ilmuwan berulang kali menangkis rambut sensorik yang sama pada kecepatan sudut yang berbeda sampai jebakan tertutup. Ada jarak 2 menit antara dua defleksi berturut-turut sampai jebakan pulih dan RP habis.
Batas bawah kecepatan sudut ω yang diperlukan untuk menutup trap pada satu defleksi ditentukan dengan meningkatkan kecepatan sudut secara bertahap setelah setiap defleksi (n = 17). Kecepatan awal berada di bawah 0,009 rad / s, karena trap tidak pernah ditutup pada kecepatan ini.
Gambar # 4
Defleksi rambut tunggal selanjutnya dilakukan dengan peningkatan kecepatan bertahap sampai jebakan dipicu ( 4A ).
Batas atas ditentukan dengan cara yang sama, dimulai dengan kecepatan ω> 3 rad / s diikuti dengan penurunan bertahap (n = 9).
Selain itu, serangkaian percobaan lain dengan satu defleksi (n = 5) dilakukan, di mana kecepatan probe gaya dijaga konstan, yang menyebabkan kecepatan sudut menengah antara 0,2 dan 0,4 rad / s, sedangkan perpindahan sudut θ secara bertahap meningkat selama waktu defleksi berikutnya untuk mendapatkan batas bawah θ yang diperlukan agar trap beroperasi di bawah kondisi defleksi tunggal rambut.
Semua defleksi tunggal yang mengarah ke penutupan trap, bersama dengan rangsangan sebelumnya yang tidak terjadi penutupan trap, mengidentifikasi wilayah dimana defleksi tunggal menyebabkan penutupan ( 4B ).
Sebuah defleksi tunggal dapat menyebabkan trap menutup pada kecepatan sudut antara defleksi (0,03 rad / s ≤ ω ≤ 4 rad / s). Tetapi defleksi saja pada kecepatan yang lebih rendah atau lebih tinggi tidak akan cukup.
Eksperimen di mana laju defleksi rambut agak rendah menunjukkan bahwa jebakan dipicu baik saat sensor mendekati pangkal rambut dan saat sensor menjauh darinya.
Defleksi tunggal pada rambut sensitif yang menghasilkan dua Titik Akses selama pembengkokan awal, mengakibatkan penutupan perangkap.
Ketika jebakan ditutup selama pendekatan probe, dua potensial aksi berurutan ( 4C ) diamati selama defleksi rambut . Ketika jebakan ditutup selama pelepasan probe, satu AP muncul pada saat defleksi rambut, dan yang kedua setelah pengangkatan probe, ketika rambut kembali ke posisi semula ( 4D ). Dalam kedua kasus tersebut, AR kedua menyebabkan penutupan langsung dari jebakan.
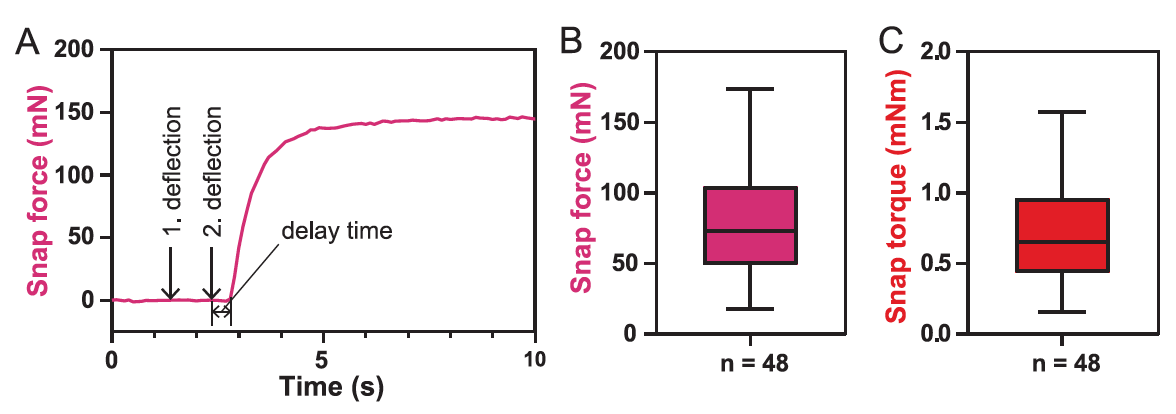
Sebagai kesimpulan, para ilmuwan memutuskan untuk mengukur gaya penutup jebakan ( 5A ).
Gambar No. 5
Untuk trap 48, nilai rata-rata gaya cengkeraman F close adalah 73 mN ( 5V), dan kisaran nilainya dari 18 hingga 174 mN.
Nilai ini lebih rendah dari yang dipublikasikan sebelumnya (140-150 mN). Ada penjelasan untuk hal ini: dalam hal ini, gaya diukur pada awal penutupan trap, dan pada pengamatan sebelumnya, gaya yang bekerja di tepi leaflet leaf-trap setelah penutupan selesai diukur.
Karena gaya yang diukur sangat tergantung pada posisi transduser dan juga pada orientasi dan ukuran lembaran, torsi penutup τ dekat di sekitar tengah lembaran dengan nilai rata-rata 0,65 mN · m adalah nilai terbaik untuk menggambarkan gaya penutup trap ( 5C ). Waktu tunda, yaitu waktu antara stimulus mekanis dan awal dari penutupan trap adalah 0,6 ± 0,3 detik.
Untuk kenalan yang lebih rinci dengan nuansa penelitian, saya sarankan Anda untuk melihatnyalaporan para ilmuwan .
Epilog
Penangkap lalat Venus tidak berlari seperti cheetah, tidak memiliki racun mematikan seperti ular kobra, dan tentunya tidak mendengar mangsanya seperti burung hantu. Tapi tanaman ini memang salah satu karnivora terbaik di planet ini, karena mekanisme perburuannya bekerja seperti jam.
Dalam pekerjaan ini, para ilmuwan dapat menentukan apa parameter ini atau itu seharusnya agar perangkap bekerja. Ternyata, dalam banyak kasus, untuk memicu jebakan, korban harus melakukan dua kesalahan berturut-turut: pertama, menyentuh rambut sensorik penangkap lalat; yang kedua adalah melakukannya lagi.
Penyimpangan rambut yang berulang dari posisi awalnya mengarah pada pembentukan potensial aksi kedua, yang memulai proses menutup jebakan. Meskipun demikian, pemodelan telah menunjukkan bahwa dalam kondisi tertentu, satu sentuhan mungkin cukup, tetapi pada kenyataannya hal ini kemungkinan besar tidak mungkin.
Dengan kata lain, dapatkah penangkap lalat Venus berfungsi sebagai pemburu nyamuk? Tidak, karena pengisap darah ini sangat kecil dan terlalu gesit. Tetapi penangkap lalat tidak menyesali lalat atau siput.
Terima kasih atas perhatiannya, tetap penasaran dan semoga akhir pekan Anda menyenangkan, guys! :)
Sedikit iklan
Terima kasih untuk tetap bersama kami. Apakah Anda menyukai artikel kami? Ingin melihat konten yang lebih menarik? Dukung kami dengan memesan atau merekomendasikan kepada teman, cloud VPS untuk pengembang mulai $ 4,99 , analog unik dari server level awal yang kami ciptakan untuk Anda: The Whole Truth About VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps dari $ 19 atau bagaimana membagi server dengan benar? (opsi tersedia dengan RAID1 dan RAID10, hingga 24 core dan hingga 40GB DDR4).
Apakah Dell R730xd 2x lebih murah di pusat data Equinix Tier IV di Amsterdam? Hanya kami yang memiliki 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV dari $ 199 di Belanda!Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - Dari $ 99! Baca tentang Bagaimana membangun infrastruktur bldg. sekelas dengan server Dell R730xd E5-2650 v4 dengan biaya € 9000 untuk satu sen?