Volume kecil pekerjaan ini segera dilakukan untuk tujuan pendidikan dan demonstrasi sekitar setahun yang lalu berdasarkan model string yang sudah dikembangkan. Seperti biasa, kemudian setelah berbaring diam selama waktu tertentu, dia baru saja menarik perhatianku.
Tidak ada gunanya mengatakan apa itu Scilab - pembaca tahu bagaimana menggunakan Internet.

Menarik bagi pembaca yang sudah akrab dengan Scilab, karya ini bisa menjadi aplikasi yang agak tidak sepele dari alat ini. Ini mengacu pada pendekatan "elemen hingga" untuk pemodelan sistem dan tampilan animasi dari hasil dengan osiloskop. Tentu saja, ada alat yang khusus "diasah" untuk mekanik, tapi, saya ulangi, tujuannya adalah untuk segera menguji Scilab.
Bagi mereka yang belum terbiasa dengan alat sederhana dan visual ini sebelumnya, akan sangat menarik untuk mengetahui hal ini. Seluruh proses untuk menguasai jenis perangkat lunak yang sebelumnya tidak dikenal ini (pemrograman visual), dari saat menginstal Xcos gratis hingga pembuatan teks berikut, membutuhkan waktu lima hari. Model sistem yang lebih sederhana dengan satu derajat kebebasan akhirnya siap pada hari kedua. Dan bagi Anda, saya pikir, hal-hal dalam studi lingkungan perangkat lunak ini, jika diinginkan, tidak akan menjadi lebih buruk, jadi lakukanlah.
Teks itu sendiri, mungkin, terlalu singkat, karena pada awalnya tidak ditujukan untuk khalayak luas. Tetapi jika pembaca memiliki pertanyaan, saya akan mencoba mengingat detailnya dan menjawab pertanyaan-pertanyaan ini. Begitu.
Sistem mekanik ("string getar dalam medium kental"), dibahas secara rinci dalam artikel ini , mewakili yang berikut: di
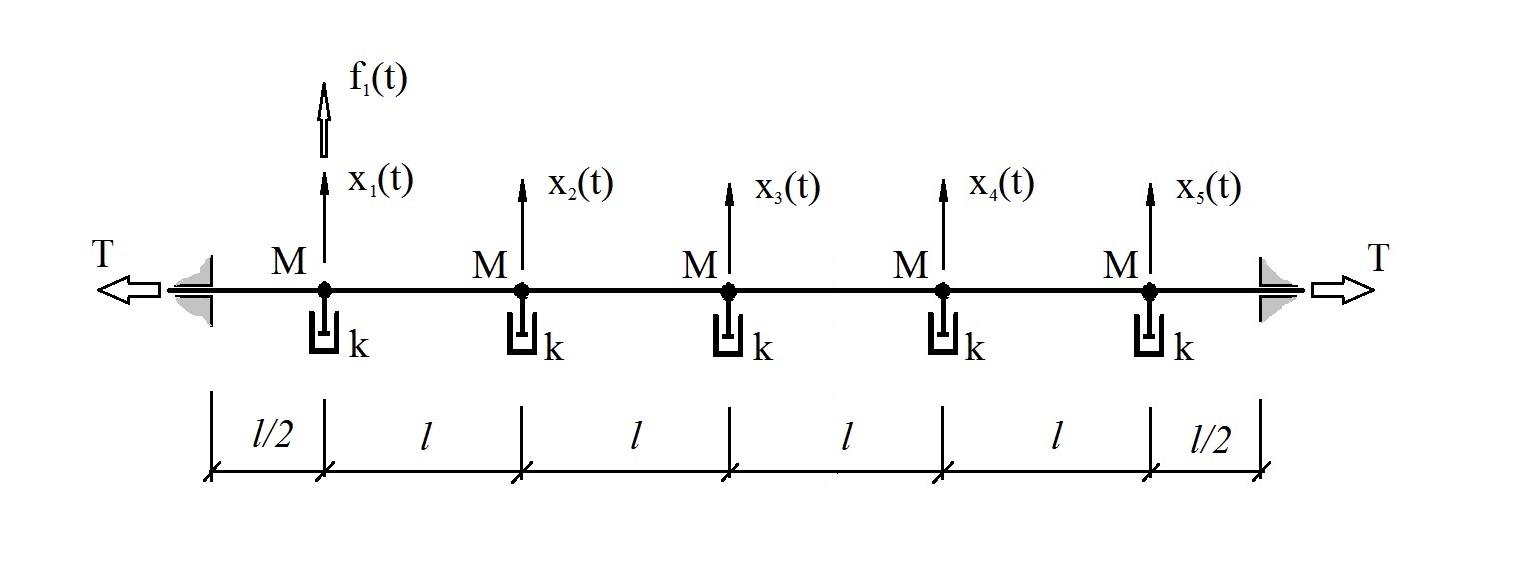
mana Δt = 0,01s, l = 1m, M = 1kg, k = 10 kg / s, T = 2000H
Untuk menyederhanakan pemodelan dan memperluas kemungkinan memodifikasi model, model dipecah menjadi beberapa elemen yang

dimodelkan sebagai subsistem ("superblok").
"Diagram" (model) berikut dibangun dalam sistem pemrograman visual Xcos
"Diagram" (model) memungkinkan simulasi perilaku sistem di bawah pengaruh impuls tunggal yang diterapkan ke node (elemen) No. 1, mendaftar dan secara grafis menampilkan pengaruh eksternal pada node No. 1 dan respons (perpindahan) sistem pada node No. 1,2,3, dan juga secara visual menampilkan perilaku sistem dalam bentuk gambar bersyarat animasi.
Masing-masing dari lima "superblok" (subsistem) yang termasuk dalam "diagram" mewakili berikut ini

Blok menerima dari data sistem utama tentang pengaruh eksternal, panjang dan perpindahan elemen terkonjugasi, waktu jam, nilai interval pengambilan sampel waktu dan tegangan string. Blok dalam pengaturannya berisi data tentang panjang, massa dan koefisien redamannya, yang dapat diubah untuk keperluan simulasi. (Kemungkinan pemblokiran blok yang dideklarasikan oleh pengembang Xcos tidak dapat direalisasikan karena, tampaknya, karena malfungsi perangkat lunak.)
Blok tersebut mengintegrasikan ODE linier yang sesuai dengan metode perbedaan hingga. Kondisi integrasi awal nol diimplementasikan menggunakan default sistem Xcos.
Blok mentransmisikan data tentang pergerakannya (dalam waktu jam sistem) dan panjang (konstan) ke sistem utama.
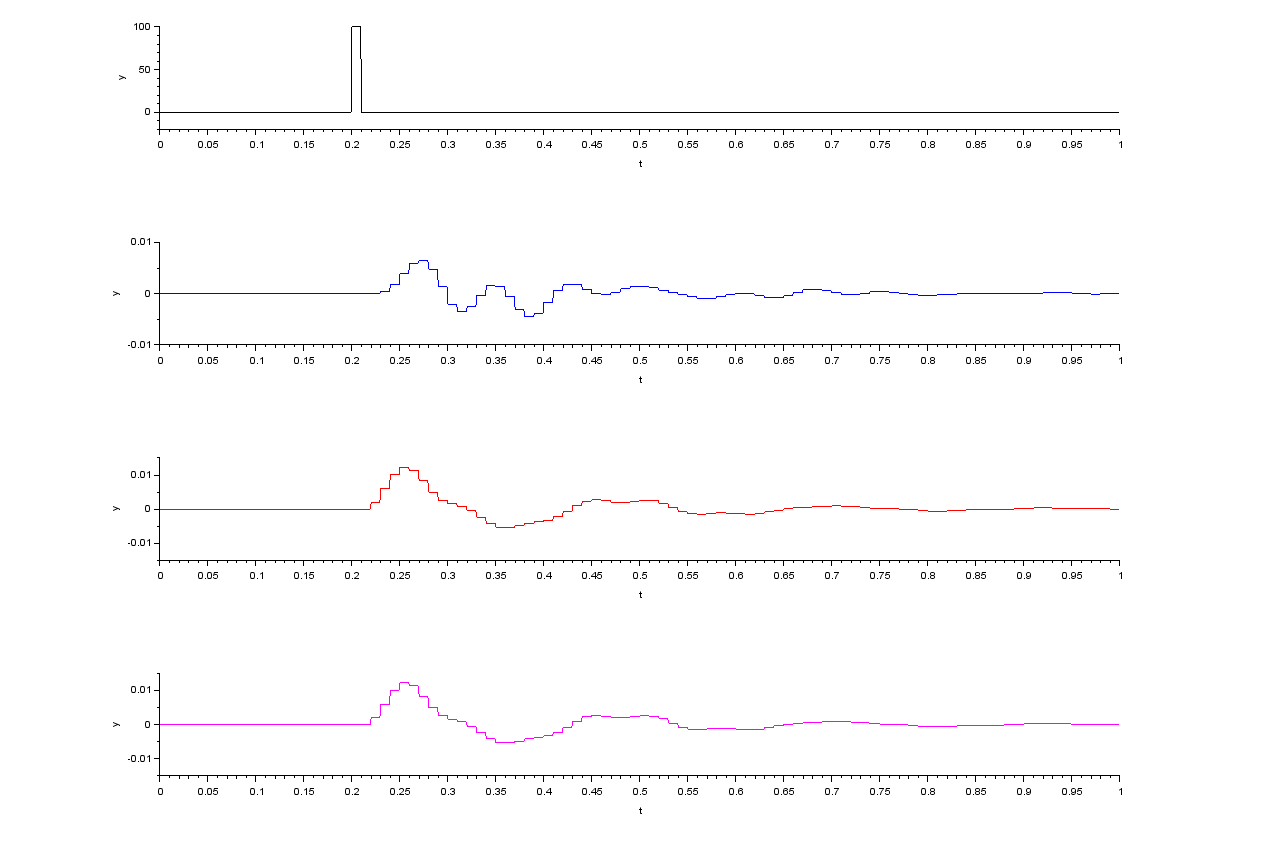
Hasil pemodelan simulasi berikut diperoleh.

Selanjutnya, untuk tujuan pengungkapan yang lebih lengkap dari properti resonansi sistem, simulasi dilakukan serupa dengan yang sebelumnya, dengan pengaruh eksternal diterapkan ke tengah-tengah string (di node No. 3).
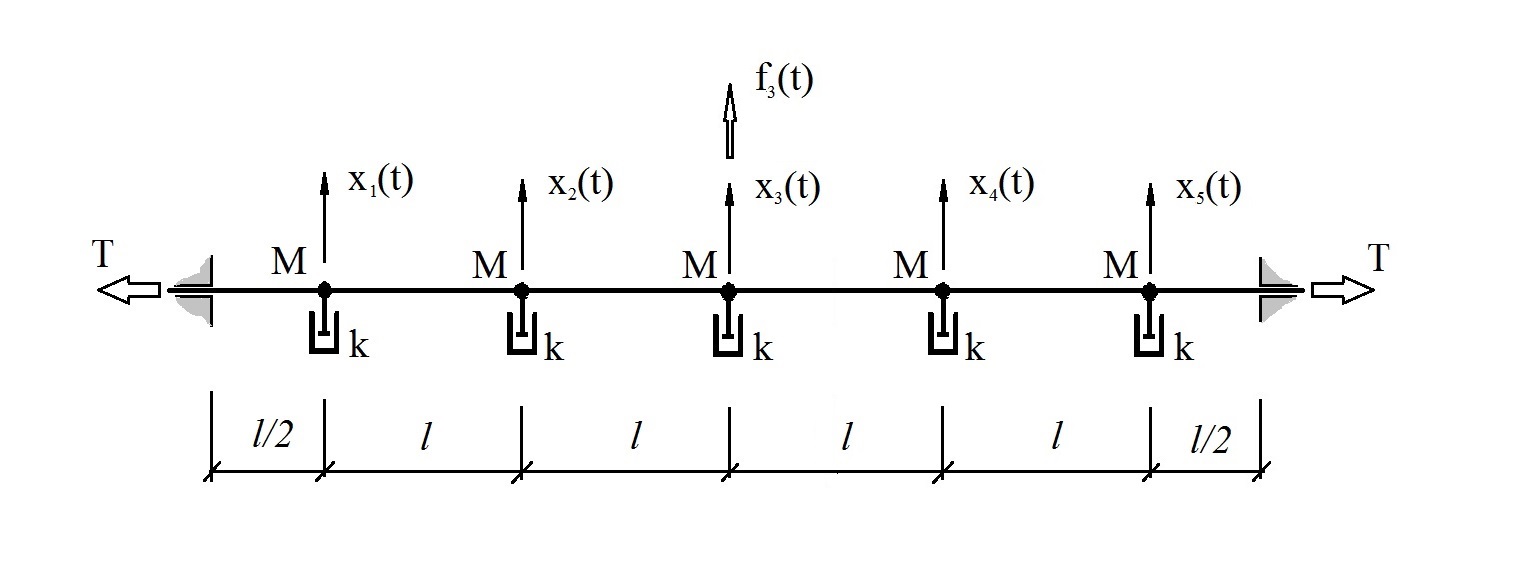

Hasil pemodelan simulasi berikut diperoleh:

Itu saja. Semoga berhasil mempelajari Scilab, semuanya.