Dalam posting ini saya akan memberi tahu Anda apa yang kami dapatkan di minggu depan pengerjaan proyek roket.

Izinkan saya mengingatkan Anda bahwa rangkaian artikel ini adalah blog yang didedikasikan untuk bagaimana kita membangun roket dari awal, tanpa pengetahuan dan keterampilan. Artikel diterbitkan mingguan pada hari Sabtu.
Mereka yang bersama kami untuk pertama kalinya, harap kenali seluruh sejarah proyek ini . Saya meminta pelanggan tetap di bawah kucing.
Turning turner
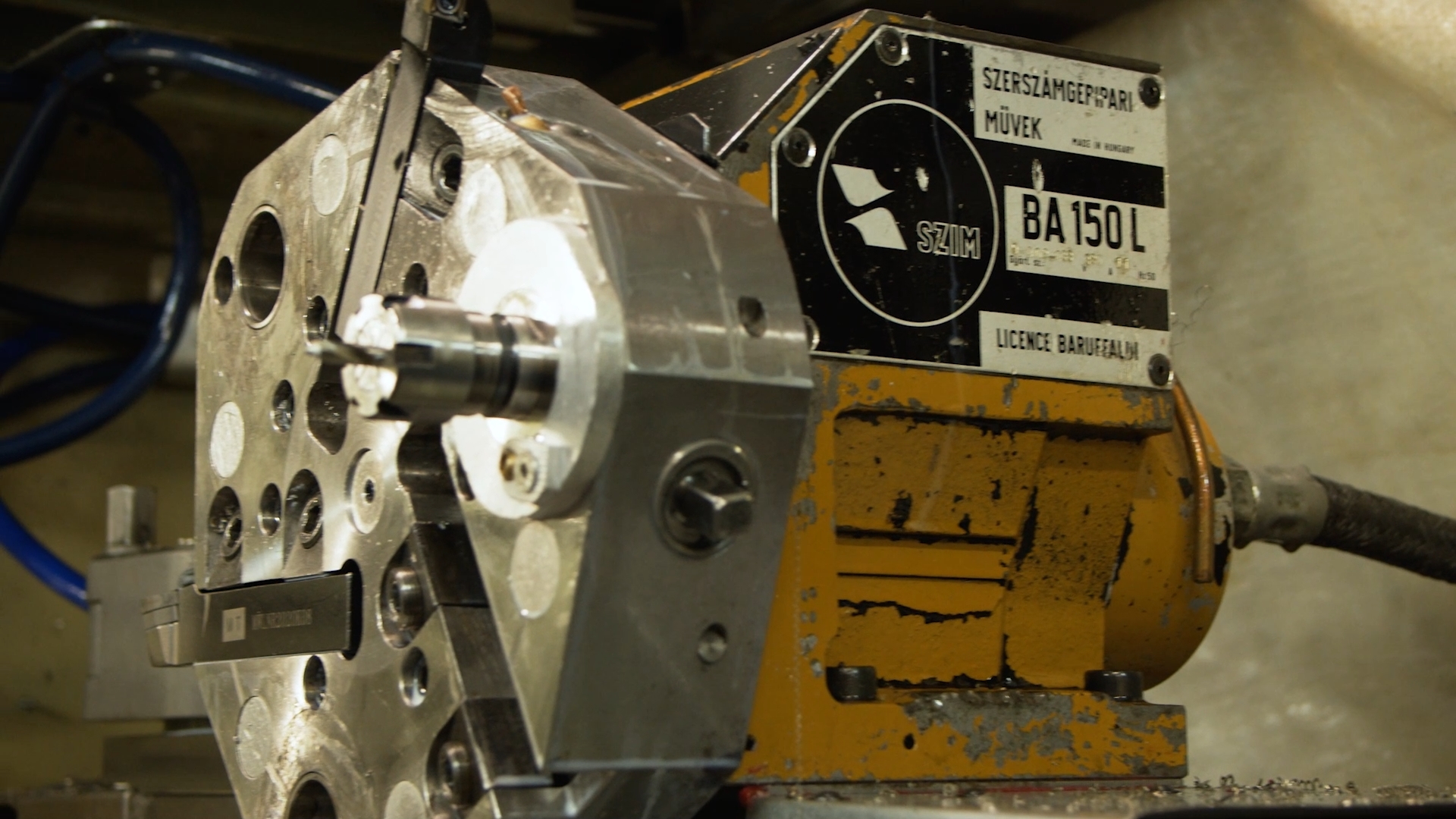
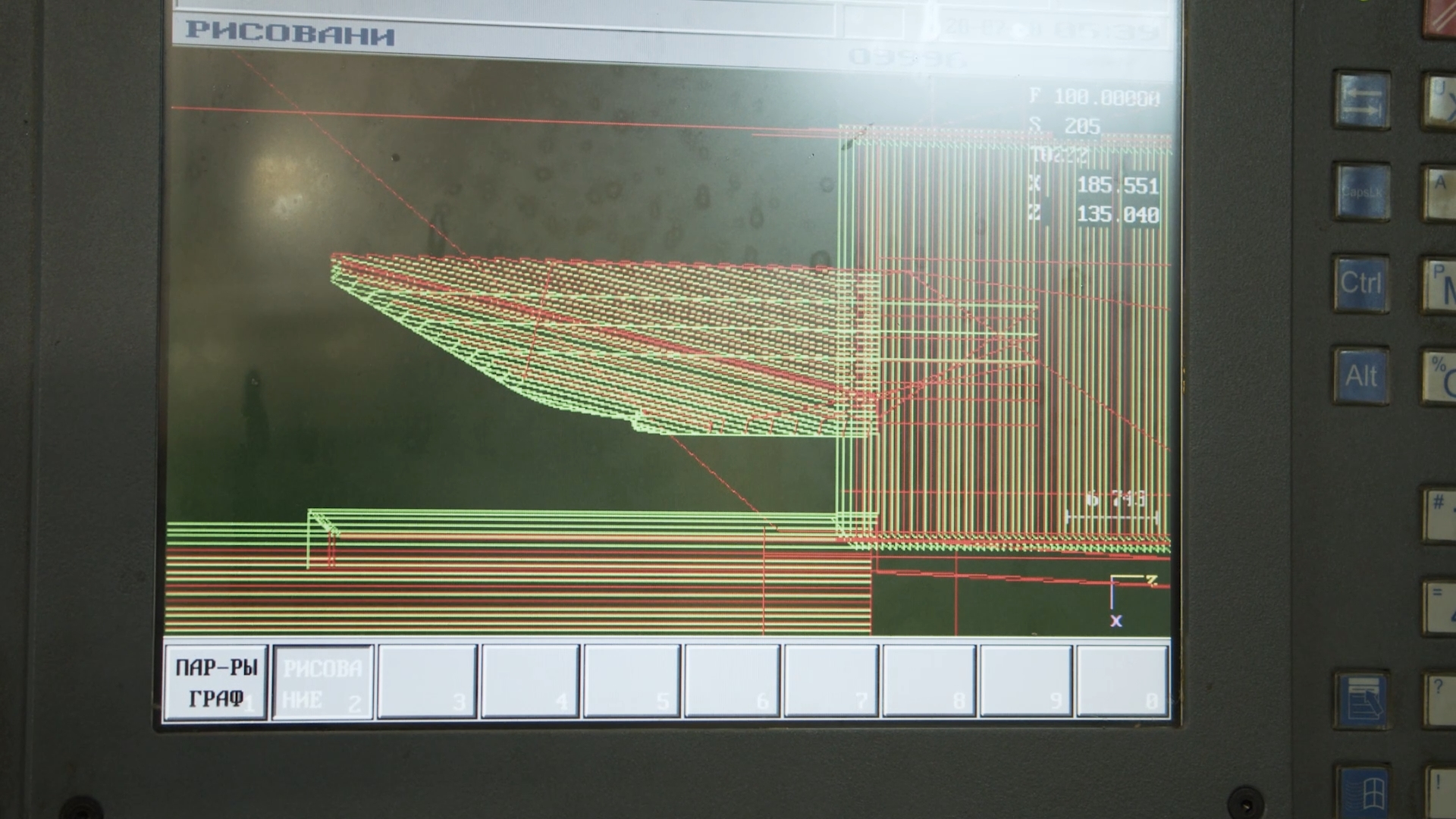
Pada seri sebelumnya, kami menghitung profil nozzle berdasarkan data yang diperoleh dari program Meteor dan Rocki-nozzle, menggambar dan mulai memikirkan implementasinya di logam. Karena nosel kami dibangun di atas kurva, dan bukan hanya dua kerucut yang sejajar, kami ingin mewujudkan potensi ini sepenuhnya. Saat membelok dengan tangan, keakuratan seperti itu tidak dapat dicapai bahkan oleh seorang pembalik dengan pengalaman bertahun-tahun, sehingga mereka mulai melihat ke arah pembubut CNC.
Kami mencari di Internet untuk mencari produksi yang dibuat sesuai pesanan - baik batch minimum yang berjumlah seribu buah, atau produksi satuan dengan biaya sebuah sayap Boeing. Dan itu tidak akan memberi kami untuk merekam proses untuk laporan video. Oleh karena itu, tanpa basa-basi, saya mengetik teman saya, dia memiliki mesin bubut yang bagus, dan perfeksionisme hanya bergulir, jadi tidak perlu khawatir tentang akurasi. Mereka membuang modelnya, Kirill (pembalik) setuju, dan segera setelah kami akan mendekatinya dengan perusahaan kami yang ramah, dia mendapatkan sebuah mesin. Sakit dan sedih, saya harus bertahan.
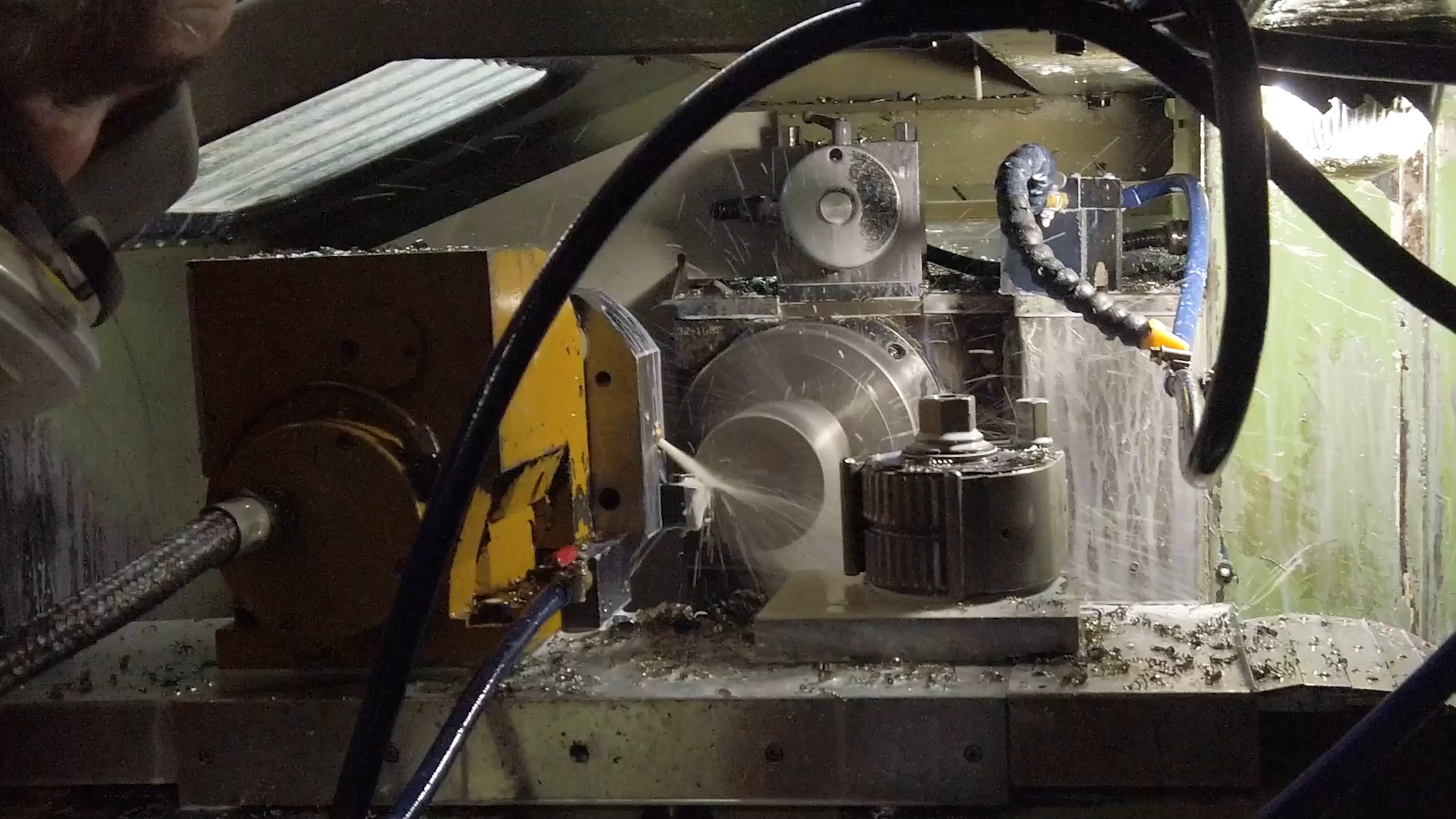
Tapi kami menunggu dan tiba. Kirill menjelaskan kepada kami bahwa untuk operasi normal dalam kondisi suhu dan gesekan gas seperti itu, billet yang kami beli dari baja St30 bisa bocor, disarankan untuk membuangnya dan malah mengeluarkan batang yang terbuat dari stainless steel food grade. Beberapa jam di mesin bubut, sekumpulan kuliah tentang bekerja dengan material dan kesesuaiannya untuk digunakan dalam kondisi berbeda - sangat menghibur dan menarik. Satu-satunya hal yang disayangkan adalah karena mode topeng dan kebisingan umum di bengkel, tidak mungkin merekamnya dengan benar. Tapi pemandangannya, bila bor dengan diameter 20 mm dengan saluran tembus untuk saringan pendingin dari baja tahan karat seperti oli, kita akan mengingatnya lama sekali.


Sayangnya, ide kami untuk memasang nosel ke pipa sepanjang ulir tidak berhasil - Kirill tidak memasukkan pipa berdiameter ini ke dalam kartrid. Nah, mari kita kembali ke ide meletakkan nosel pada pipa panas, menyegelnya dengan sealant tahan panas, mengebor dan membaut, memotong benang di badan pipa.
Saya ingin berterima kasih sekali lagi kepada Paman Kirill: terima kasih banyak, Anda banyak membantu dan memberi tahu banyak!
Berdiri Elektronik
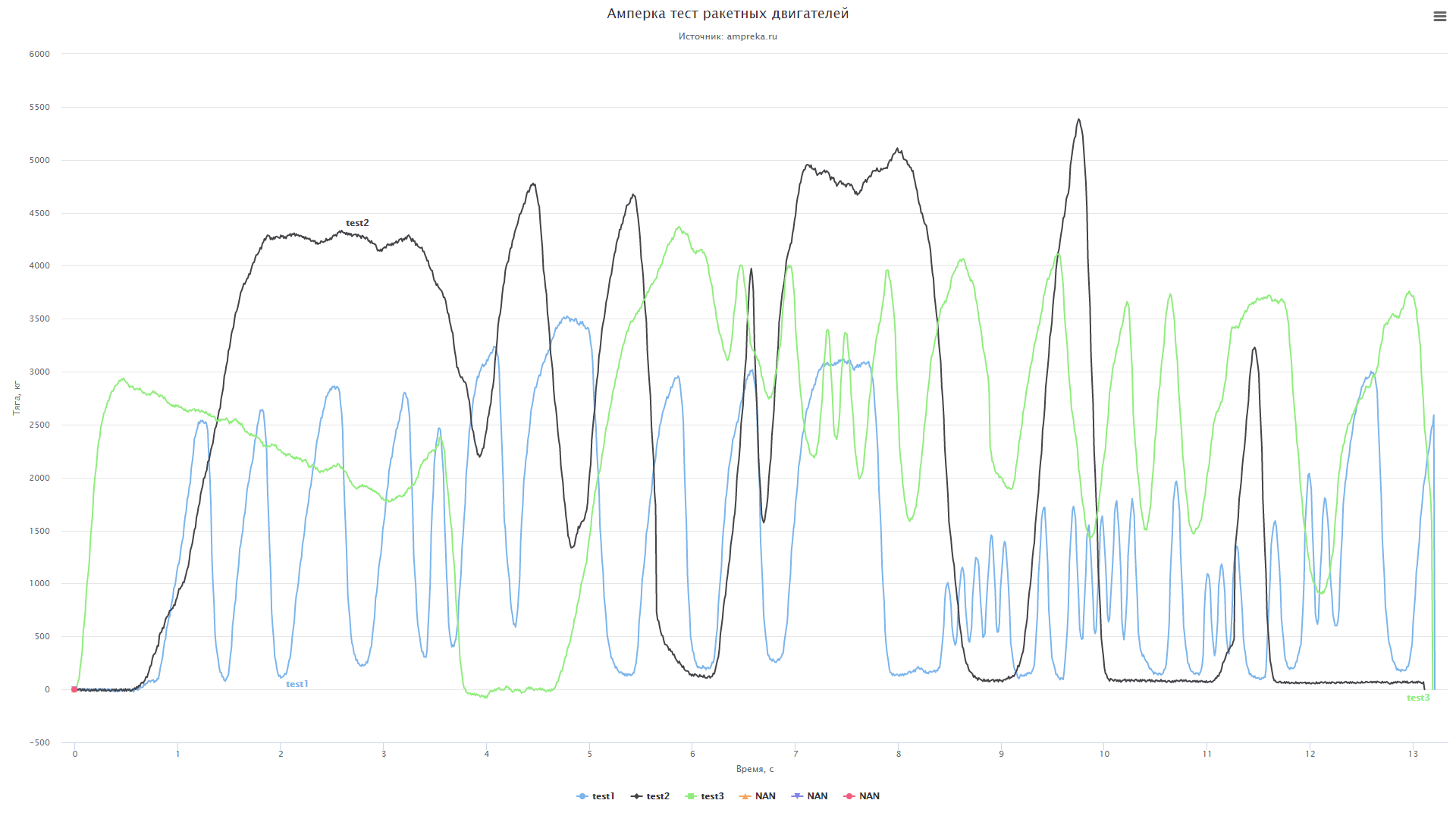
Karena timbangan mekanis ditinggalkan dan digantikan oleh alat pengukur regangan, mereka mulai menari darinya. Muncul pertanyaan tentang topik menyajikan data dalam bentuk yang nyaman untuk persepsi dan analisis, dan saya juga ingin meninggalkan kabel, serta dapat memulai penyalaan dari tempat berlindung, dari kejauhan, karena keselamatan di atas segalanya. Pada akhirnya, kami memasang pipa dan akan mengisinya dengan muatan propelan.
Jadi, papan Wemos D1 R2 Mini bertenaga ESP-12F dipilih sebagai otak untuk stand. Jika seseorang tidak tahu, ini adalah pengontrol 32-bit dengan memori 4MB (flash drive disolder tepat di papan debug) dan WIFI di papan adalah yang Anda butuhkan.

Akan ada dua sensor di dudukan, yaitu setengah jembatan, tetapi kami memutuskan untuk menghubungkannya menggunakan sirkuit jembatan, yang akan memberikan akurasi lebih tinggi dan memungkinkan kami untuk meningkatkan batas pengukuran hingga 100 kg (dua sensor masing-masing 50 kg). Ternyata tunggangan seperti itu. Tekanan seragam akan dicapai melalui lengan ayun.
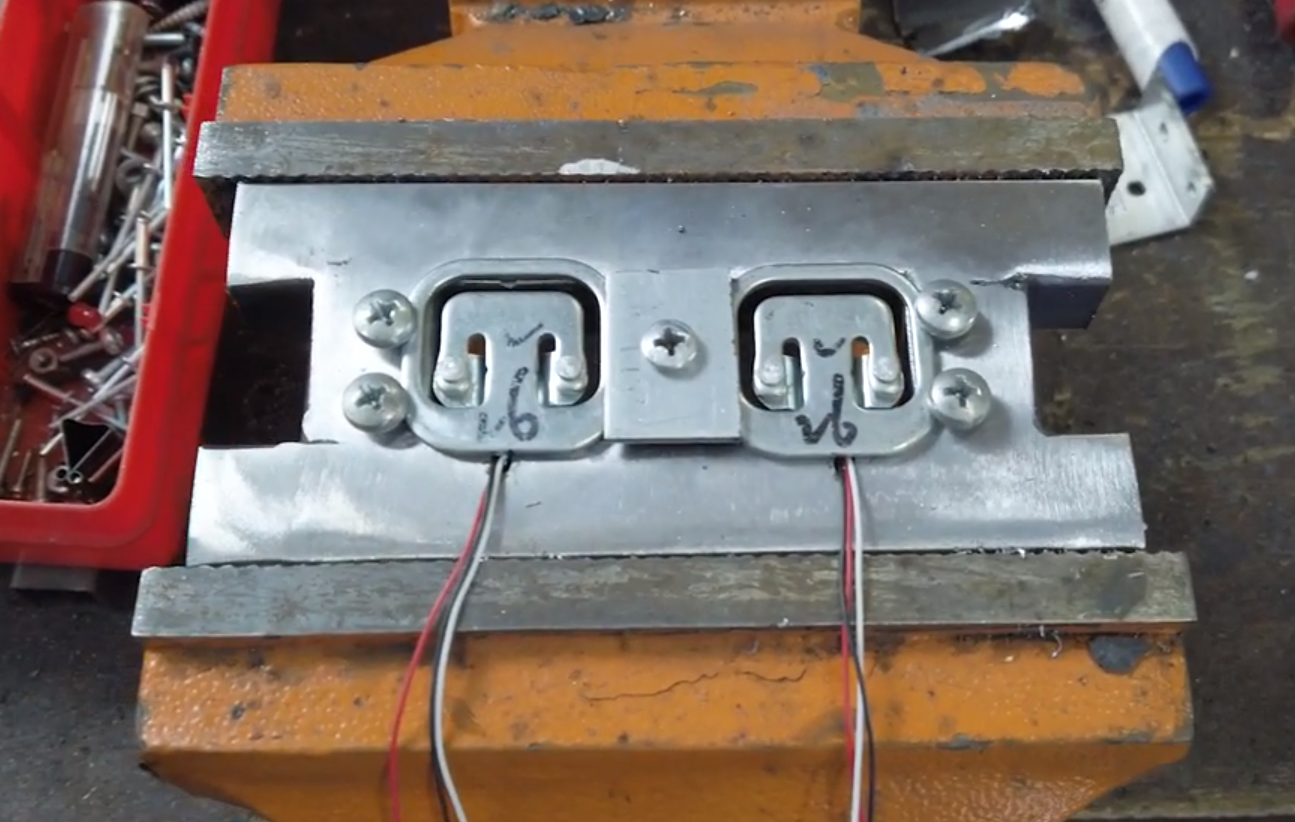
Sensor diinterogasi oleh modul pada sirkuit mikro HX711. Secara default, modul ini dikabelkan sehingga memberikan frekuensi sampling 10Hz, tetapi cukup menyolder ulang resistor jumper akan menaikkan frekuensi menjadi 80Hz. Kronometer menunjukkan bahwa dibutuhkan 11-12ms untuk mendapatkan satu nilai, mari kita tetapkan periode 15ms untuk berjaga-jaga, hasilnya sekitar 66Hz, yang cukup dapat diterima.
Pencatatan dilakukan pada memori SPIFFS internal, yang memungkinkan Anda mengemas file ke dalam format yang nyaman (dalam kasus kami, txt), menyalinnya ke media lain dan memprosesnya dalam program eksternal jika diinginkan.

Tapi saya ingin kejelasan. Oleh karena itu, antarmuka web telah dibuat di mana Anda dapat membuat grafik, melihat daya dorong setiap saat, serta menghamparkan grafik di atas satu sama lain dan membandingkan. Jika perlu, Anda juga dapat menonaktifkan grafik yang tidak perlu. Dibuat untuk perbandingan 6 motor masing-masing selama 20 detik, dapat diganti jika diinginkan. Tautan ke kode akan berada di akhir artikel. Izinkan saya mengingatkan Anda bahwa untuk mendapatkan data yang benar, sel beban harus dikalibrasi sebelum digunakan. Sketsa kalibrasi disertakan. Ada banyak fungsi utilitas yang tersisa di sketsa yang mungkin berguna.
Saya juga ingin mengingatkan Anda bahwa sketsa menggunakan sistem file SPIFFS, saya sarankan Anda terlebih dahulu membiasakan diri dengan pekerjaannya. Saat pemrograman, templat Sergey Tretyakov digunakan , skrip pembuatan bagan diambil dari situs web Highcharts . Saat Anda menekan tombol start, daya akan disuplai ke penyala listrik melalui MOSFET, yang memulai penyalaan bahan bakar. Oleh karena itu, kami memiliki semua yang siap untuk uji tembak, yang akan kami lakukan awal minggu depan, dan pada hari Sabtu kami akan membagikan data dan pengalaman kami. Video demi artikel:

Tetap bersama kami, akan ada lebih banyak hal menarik.
Tautan: Firmware Grafik Firmware
Kalibrasi