
Kami sedang mengembangkan robot untuk mengumpulkan bola golf . Kami membutuhkan servo untuk membuka lubang tetesan bola. Kami telah menguji sejumlah besar dan hari ini kami ingin memberi tahu Anda tentang Dynamixel analog yang sangat menarik, yang harganya lebih dari setengah harga.
Drive servo model modern saat ini mewakili perangkat lengkap dalam satu rumah (motor dengan gearbox dan papan kontrol). Cara paling umum untuk mengontrol model servos adalah protokol PWM, posisi servomotor ditentukan oleh lebar pulsa, keberadaan pulsa berfungsi sebagai sinyal sakelar. Pendekatan ini memungkinkan Anda untuk menyederhanakan elektronik sebanyak mungkin, tetapi bukan tanpa masalah.
Pertama, tidak ada umpan balik, dan ada juga masalah dengan menghubungkan ke PC dengan platform serupa (biasanya Arduino atau mikrokontroler lain diperlukan sebagai interlayer). Kedua, karena kekhasan protokol, akurasi penentuan posisi jarang melebihi 1 \ 256 per rentang servo (270 atau 180 derajat). Ketiga, kerusakan mekanis dan panas berlebih tidak dapat dideteksi. Semua masalah ini mengarah pada fakta bahwa servos semacam itu tidak dapat digunakan dalam tugas-tugas di mana diperlukan untuk secara konsisten mengontrol sejumlah besar derajat dengan akurasi tinggi.
Untuk mengatasi masalah ini, Anda perlu menggunakan bus data umum. Solusi lengkap yang populer adalah servomotors Dynamixel yang terkenal. Protokol ini kompatibel dengan UART reguler (diperlukan skema negosiasi sederhana). Ini dapat dihubungkan ke komputer mana pun dengan port ini (Arduino, Raspberry, pc). Pendekatan ini memungkinkan Anda untuk menyinkronkan pergerakan drive servo, menerima umpan balik, memantau kinerja (kesalahan, suhu), dan menyetel pengontrol PID. Pengkabelan juga disederhanakan, sekarang dimungkinkan untuk merakit servo secara seri. Pabrikan memiliki berbagai macam model untuk setiap selera dan warna. Namun, harganya masih jauh di atas servo drive PWM konvensional.
Dan kemudian kami mendapat servo drive produksi dalam negeri IlyushaSepenuhnya kompatibel dengan protokol Dynamixel v1. Kami bertanya-tanya binatang apa itu dan apa yang bisa dilakukannya. Kami memutuskan untuk mengujinya dan apa yang akan kami sampaikan di bawah ini.
Parameter dasar
Tegangan suplai 6-15V
Torsi maksimum 60kg * cm
Resolusi enkoder 16384 parrot 360 derajat
Perlindungan terhadap panas berlebih
Perlindungan saat ini
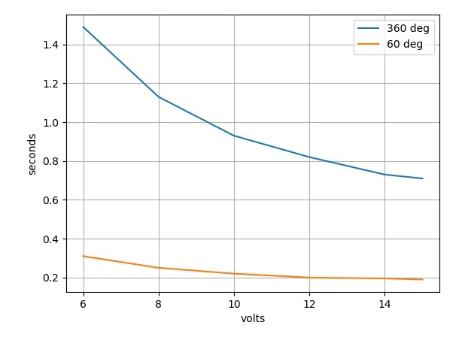
Pertama, kami akan mengukur kecepatan rotasi tanpa beban untuk kisaran tegangan
6, 10, 12, 14, 15 V
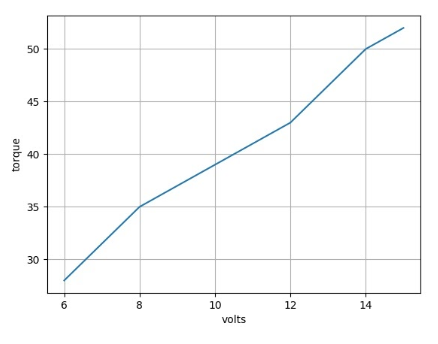
Dan sekarang kami akan mengukur maksimum saat, pada nilai tegangan yang sama:
Waktu transisi untuk pergerakan 60 derajat.
Dan sekarang hal yang paling tidak menyenangkan adalah serangan balik di gearbox.
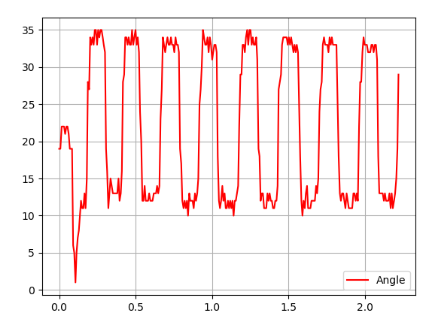
Dari sini kita dapat menyimpulkan bahwa reaksi adalah ~ 0,5 derajat:

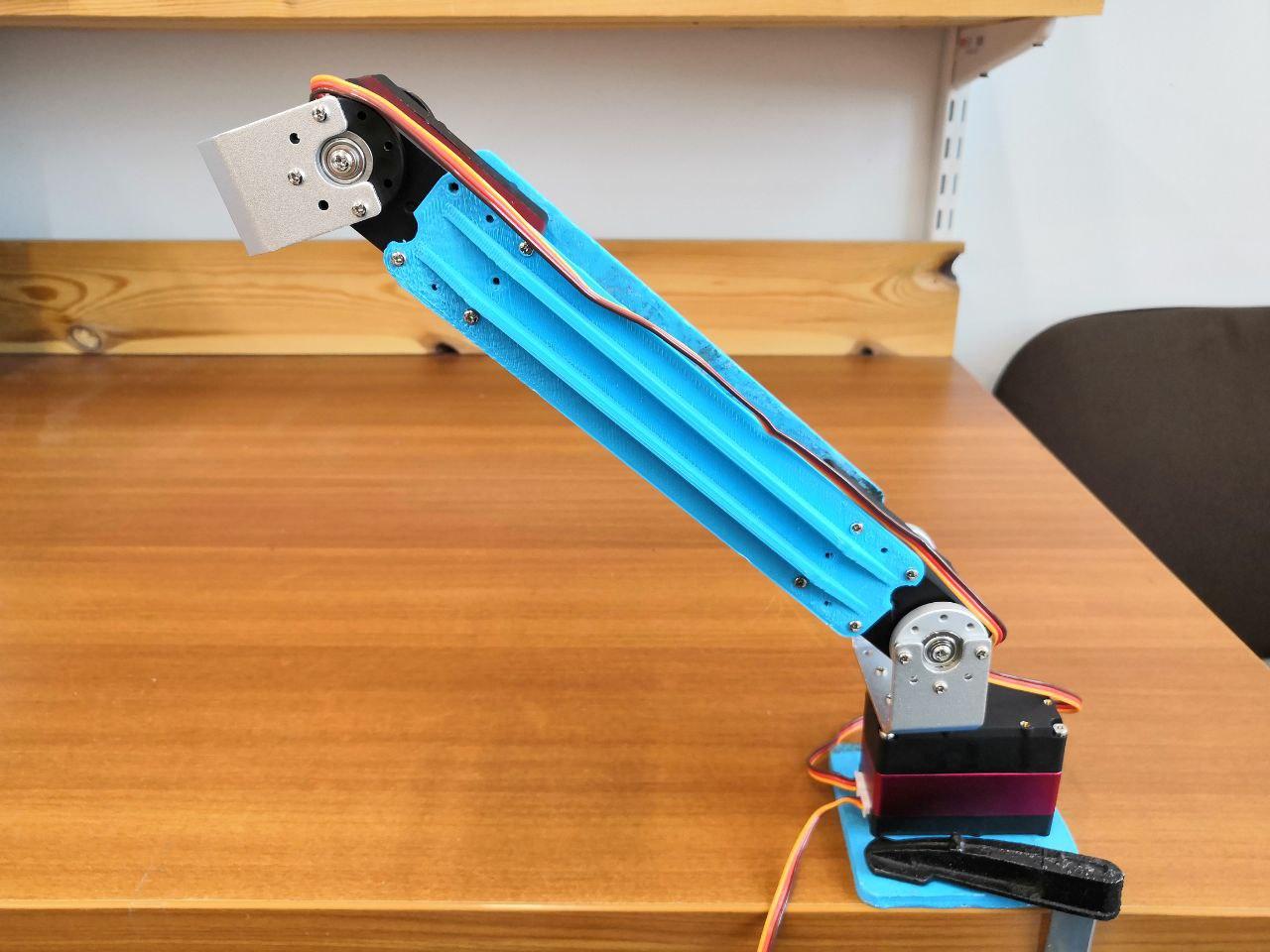
Karakteristiknya cocok untuk keperluan kami, mengingat harganya lebih dari dua kali lebih rendah, kami memutuskan untuk menggunakan servos ini di perangkat kami.